
我之前一直苦于找到一种合理的方式来做满负载开机启动的方法,在按照目前使用的先增加原边和副边全桥的PWM到50%,然后开始移相的办法。多次尝试都没有能减少启动时的变压器电流应力。从启动的波形来看,在进行原副边占空比增大到50%的时间段,副边没有就没有电压输出,仅仅只是建立变压器原边的励磁电流和环流,空跑了损耗。原副边的功率传递真正是发生在两者之间存在相位差时,在副边的输出电压由零上升到输出设定值之间,会产生非常大的原边或副边变压器电流。这个电流非常大,根据我的测试会达到峰峰值90A之高(满负载7KW DAB),而且是持续非常多的周期,根据软启动的时间来看,通常会达到百毫秒级别,所以我认为是比较容易影响到满负载启动的可靠性的问题了,因为从测试来看,当输入电压更高,带负载功率更大或者更严重,特别是容性负载启机时,将会发现最大的电流应力。所以不论怎么来看,都应该想办法来解决这个启动电流应力的问题。
在之前多次尝试中,发现仅仅靠占空比增大带来的效果不是很明显,所以就删除了占空比软启动。仅在恒压和恒流环两个环的较低值输出与软启动做比较,软启动程序以线性增加的方式从0开始增大到最大值,然后带着输出输出逐渐上升,直到电压或电流接近控制设定值,然后由反馈环接管,实现闭环控制。通过这种办法可以降低一部分的启动电流应力,但是依然很大。所以综合分析启动电流应力的关键问题就是DAB的电感电流产生的原因,受到Ton*(Vin – n*Vo)/L的关系。当输出电压稳定后,电感两端的电压非常低,所以在相同的时间内电感电流上升速度很慢,所以就是在稳态工作时,电感电流仅为30A。但是在启动初期,由于输出电压还未建立起来,所以仅有VIN电压加载电感两端,导致电感电流的变化斜率非常高,在相同的开关周期内就会跑到非常高的电感电流去,这里就会产生非常大的电流应力。那么从这个公式来看,解决办法有两个方向:
第一种就是在单个开关周期时间内减少TON,也就是增大开关频率,以LLC的降频软启动的方式来实现对导通时间的逐步增大的控制,也就能控制电流应力。
第二种办法就是减少Vin – n*vo的值,降低电感电流的斜率,在相同的时间内也就能控制电流应力。
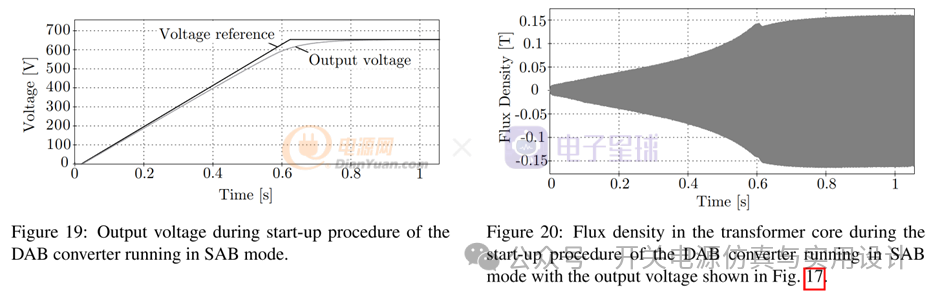
第一种办法的实现比较简单,就略过不表。这里只谈第二种办法的实现,在启机时要减少VIN-VO的办法就是设法最快的速度把输出电压提升到一个值,这样电感电压就会下降,同样电流应力就会减少。今天下午我突然看到一篇论文中讲到对变压器磁通平衡的抑制办法,其实变压器磁通就是电流波形。论文中主要提到一个启机的办法:在开机时候控制原边全桥的内移相角度,从最大移相角度减少到零,对应着加到电感和变压器的电压占空比由最低上升到最大,于此同时关闭副边全桥的输出,让副边全桥仅工作在体二极管整流模式。这样原边占空比增大后传递到变压器功率就会被副边的二极管整流输出,得到电流放负载和输出电容提供电流,从而达到快速的提升输出电感的目的。这样就可以减少加在电感两端的电压差,从而减少电感电流应力,可见论文。
这篇论文的核心观点就是启动时仅使用原边全桥做启动,同时把输出电压的设定值作为斜坡的方式给定,这种就可以完美的实现线性软启动,同时也有非常低的电流应力。但是这种操作的关键点是单纯靠原边输入,副边不工作仅靠整流能达到过大的输出功率,显然是没有办法在升压模式工作的,如果输出高于输入,就可能只能启动到输入电压相等的地方,然后开移相来实现最后的功率输出。这里就存在由单原边全桥切到副边全桥一起工作时的问题。
我简单在仿真环境中测试了一下,如果仅开原边PWM启动即使开到50%后,输出功率最多到40%,所以论文中仅仅依靠原边PWM来实现最大功率的输出是不太现实的。所以问题就是,论文中有些东西是有隐瞒的,不过我也可以推到在输出占空比达到50%输出后该如何把移相接上?
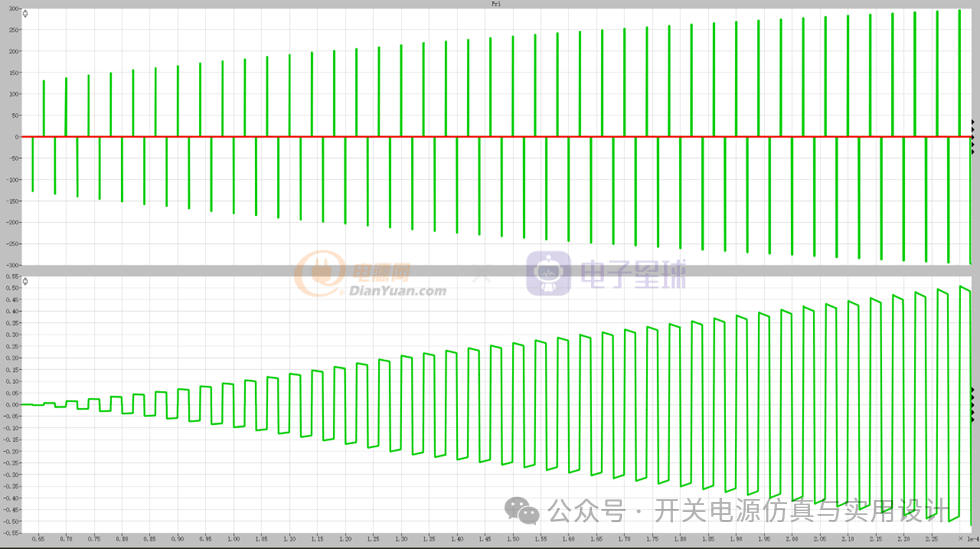
下图是用先增大占空比原边全桥占空比到50%,然后把CC&CV和软启动的输出三个取最小值作为输出控制功率的启动波形,其中蓝色是原边全桥PWM,绿色是原边变压器的电流,黄色是副边变压器的输出电压。可以看到的是随着占空比的增大到50%,副边输出电压已经建立起来,但是还不到输出设定值,具体原因上文中已经说明了。但是副边变压器的电压输出先起来然后又掉下去,然后又起来,最后开始满负载功率输出。其中的问题是副边的输出电压为什么会跌落到零,然后为什么又会升起来。
主要是我们目前设置的软启动的过程存在关系,因为软启动是直接模拟从环路从0输出,功率输出部分从最低开始出到最大,期间由于输出端一直负载着较大的功率所以变压器的输出电压拉低到了零,但是副边全桥依然是在工作,只是输出功率受到限制。但是随着软启动的值的继续增加,原边和副边的移动相角度持续增加,当达到可以建立副边输出电压的功率时,就会开始体现输出电压开始上升。随意从输出功率过渡的角度来看,如果在50%占空比启动结束后,应该直接把移相的的功率输出放在中等功率的位置,也就是在TPS控制程序中的Plow的位置,让TPS控制直接从较大的功率输出,从而减少或者是降低中间副边输出电流跌落的时间。
先原边PWM增大到50%,然后开副边PWM和移相,因为存在控制增益不连续问题,导致输出电压会跌落再起来,明显还不够好,所以还需要继续研究:
在软启动工作时为了降低电流应力,其本质是要降低此阶段变压器的传输功率。因此可以从传输公式的上想办法,如开关频率和原边电压Vin。可以通过提升开关频率和降低输入原边输入电压Vin来降低传递功率。因此解决启机时的电流应力方法可以使用
1、在开机初始情况下以最大开关频率启动,然后根据所需软起动时间来调整频率从最大开关下降到系统所设定的额定工作频率的步进step,再按软起动设定时间来逐步下调开关频率来实现对输出功率的调节。
2、通过设定在上电初始阶段时原边内移相的角度,根据软起动设定的步进,在软起动的设定时间内逐步的从0.485最大值减少到0,来实现在软起动阶段逐步的增大原边变压器上的电压和持续的脉冲宽度时间,以此方法来实现逐步的增大原边向副边传输功率的V*T时间,来实现对传输功率的限制。
3、在软起动结束后,需过渡到闭环控制电路接管功率系统的传输功率,实现正常的输出侧控制。
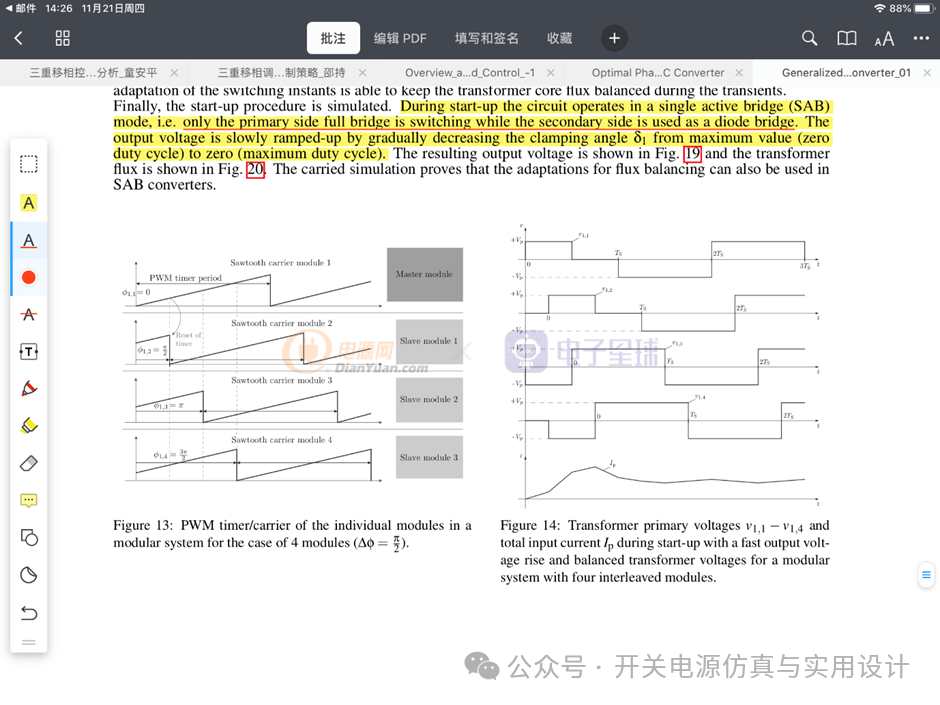
下图是DAB变换器的功率和控制实现,包含了软起动的控制方法,可见:
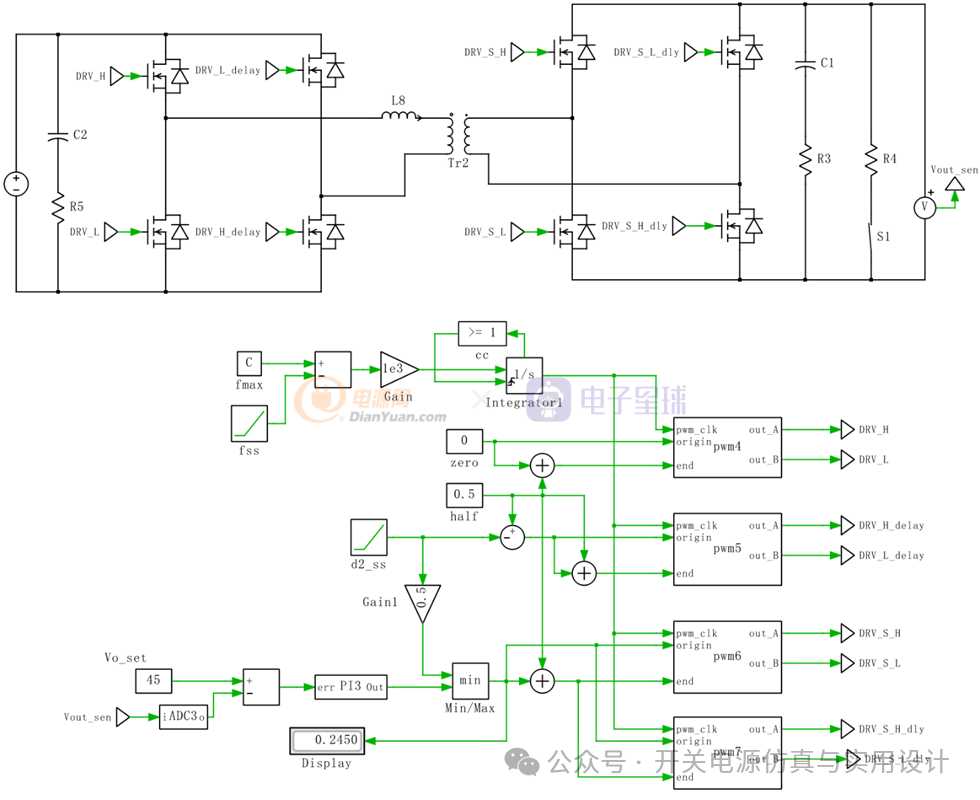
根据软起动时间设置频率变化斜坡变量fss取值范围是最高开关频率fss到系统稳定工作时的开关频率,再使用系统最高开关频率设定值减去软起动斜坡变量fss。将该开关频率控制变量放到1000倍后,使用积分器Integrator来实现PWM输出的变频载波PWM RAMP,分别输入到四路PWM输出模块。
PWM4模块是原边全桥第一桥臂的驱动信号作为所有PWM移相控制信号的参考原点,所以该路PWM的启动点和结束点分别标定为0和0.5,与PWM RAMP比较则可以得到第一桥臂的高低两个驱动信号输出。
PWM5模块是原边全桥第二桥臂的的驱动信号,也即为原边桥臂的内移相控制信号的输出。
为了降低DAB变换器启动时的开关器件的应力,设置一斜坡信号d2_ss,它的取值范围是从从0递增到0.5,其意义是使原边全桥的内部移相角度从180度开始,随着软起动时间逐渐下降到0度,来实现原边全桥的输出PWM,再软起动时随着d2_ss的斜率逐渐的增大输出PWM的脉宽,来实现向副边传输的V*T值增大。
在实现上是使用0.5对d2_ss做减法,使PWM5模块的PWM信号的启动位置从PWM RAMP的0.5开始向0移动,实现原边全桥内部的移相角度从最大值0.5减小到0(180°到0°),最终实现无内移相的工作,也就是50%的方波输出,以此来传输最大的输出功率。
在原边全桥>副边全桥的PWM控制上,使用输出电压或电流的闭环控制输出与0.5*d2_ss信号来实现对输出功率的调节。根据DAB变换器的传输公式,当原边全桥与副边全桥的相位差在90°时,达到系统的最大传输功率。因此这里使用0.5*d2_ss来实现副边全桥的移相角度滞后从0°随着d2_ss的斜率逐渐到90°变化。随着软起动的进行,当输出电压或输出电流达到设定值之后,电压环控制器PI3的输出会低于0.5*d2_ss的值,因此原边全桥与副边全桥的移相角度的由反馈环接管来控制输出功率。
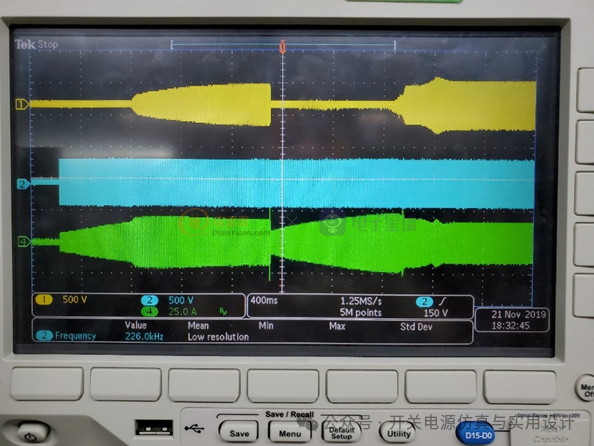
下图是满负载启动的波形,CH1的绿色的原边变压器电压,红色的副边变压器电压,CH2是变压器电流波形,可见在使用本发明提出的变频+逐步增大内移相角度控制方法,能明显的控制启动时刻的变压器电流,该实现方法实现简单,更易于在DSP和MCU环境中实现。
实现:

测试:
本人能力有限,如有错误,恳请帮忙指正,感谢支持。谢谢。