
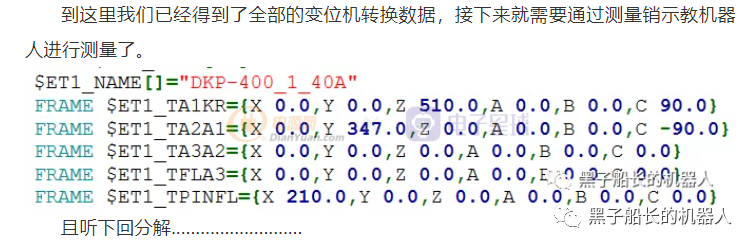
以上只是机器人系统知道运动系统(变位机)本身的机械数据,但是我们还是需要对变位机进行测量,才能使变位机的轴与机器人轴的运动同步并且数学上耦合。什么意思呢,我们可以这么理解,机器人要和变位机进行协调运动,那么机器人就需要能识别变位机的精确位置,也就是要在示教器上进行“测量基点”。如何进行测量基点?将一个已测量工具的 TCP 四 次移动至运动系统上的参照点(有点类似示教法定义TCP)。该参考点的位置必须每次都不同。这可以通过移动运动系统的轴来实现。机器人控制系统会根据参照点的不同位置计算出运动系统的基点。

具体步骤:(这里使用的是8.3的系统)

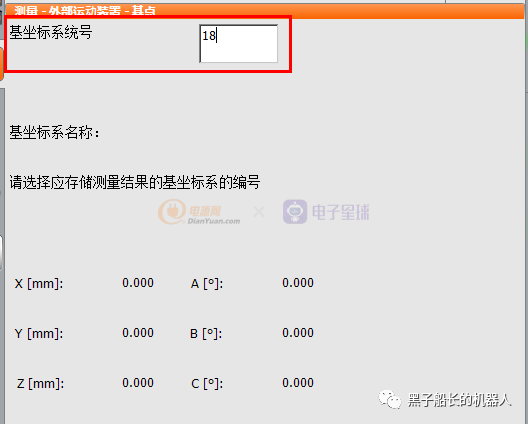
选择基坐标系系统号(1-32)
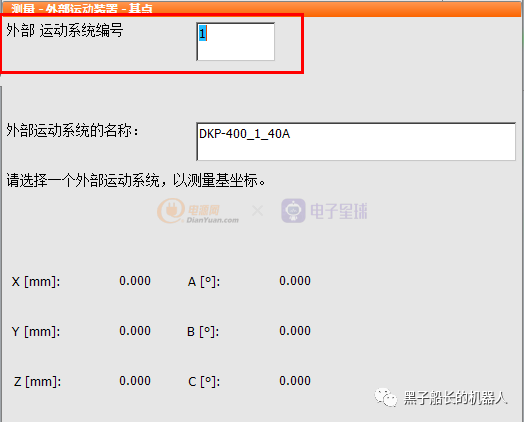
变位机编号(几个外部系统)

选择工具(用来测量的TCP)


参考点位置
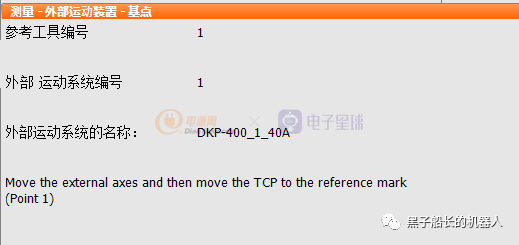
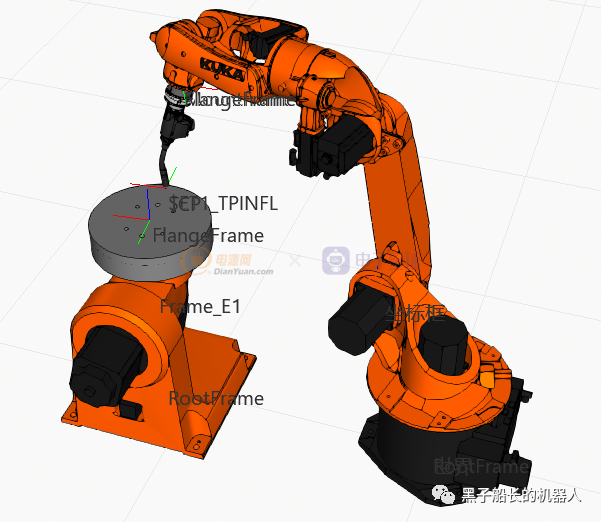
将机器人TCP移动至参考点位置1

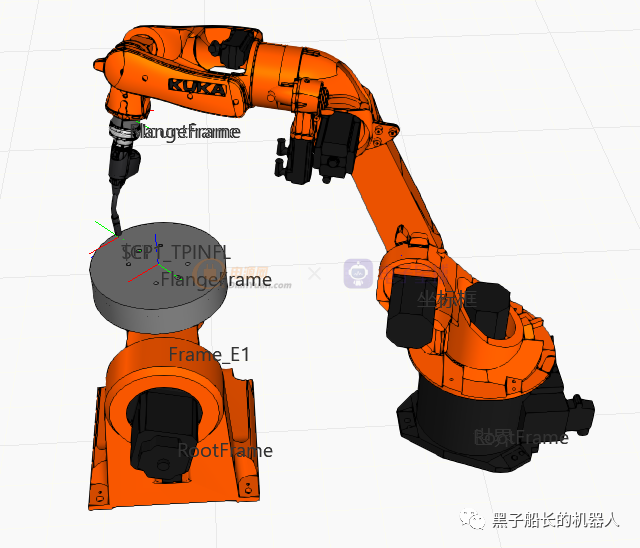
将机器人TCP移动至参考点位置2
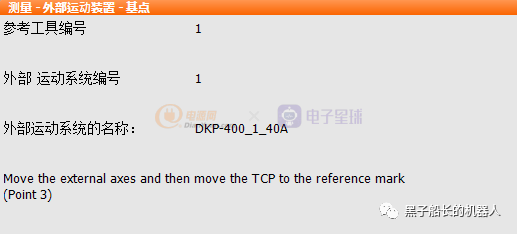
将机器人TCP移动至参考点位置3

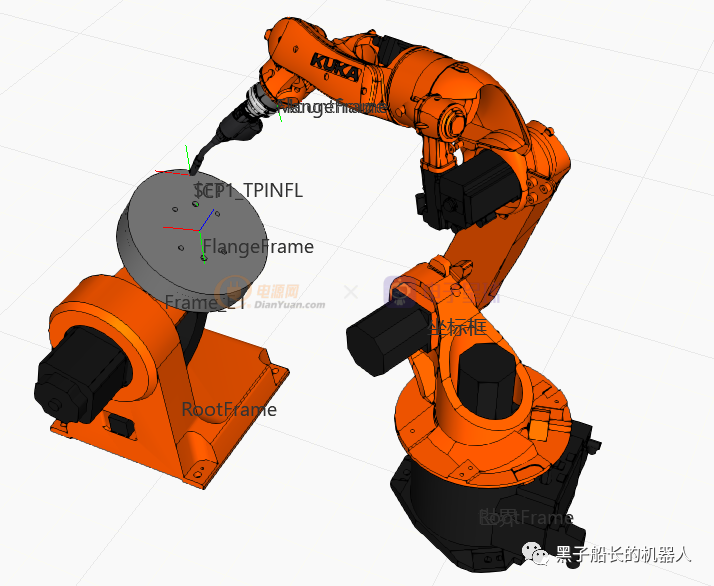
将机器人TCP移动至参考点位置4

至此基本就测量完成,上图测量误差过大,那么就需要重新测量,因为simpro没有提供和officelite连接的模板,所以没能用进行完整的演示操作。
