dianyuan举办的你买套件我买单活动很好,能够让热爱电子设计的工程师动起手来,能够和大家分析自己的创意。
一直对无人机非常感兴趣,这次有机会进行DIY活动,也非常珍惜这个机会。
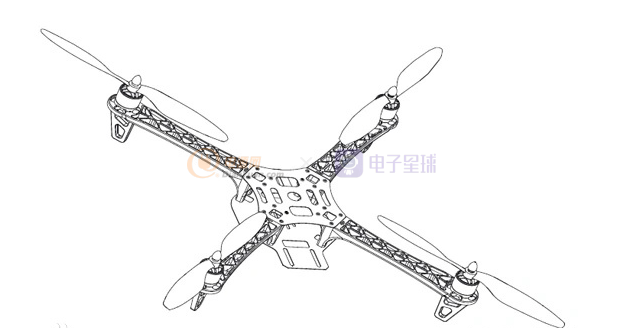
对四个电机驱动的无人机也有研究。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。内部有控制器,四个电机在四个轴上。
飞行原理
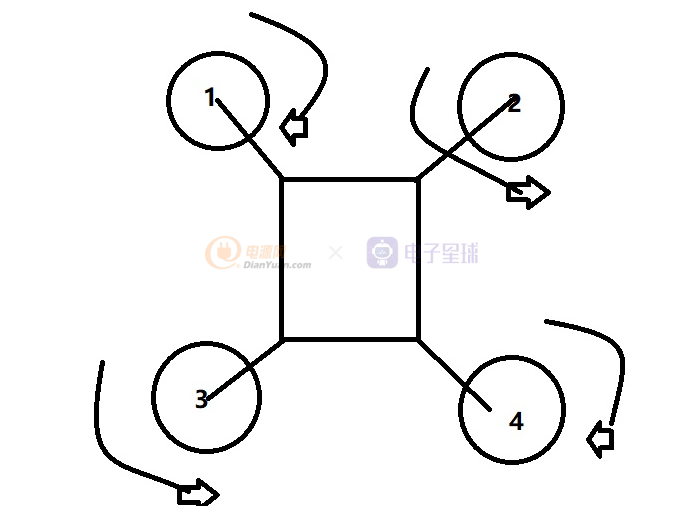
相对平衡/静止:
两个螺旋桨顺时针转动,两个螺旋桨逆时针转动,来互相抵消转动扭矩和陀螺效应,达到一个相对平衡的状态,从而不会一直转圈,如图1和4顺时针旋转,2和3逆时针旋转来互相抵消旋转产生的扭矩。
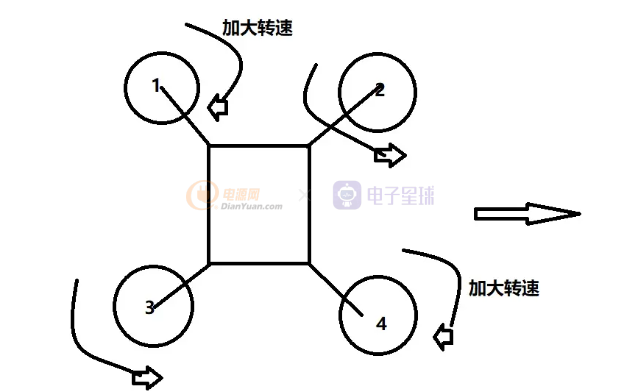
上升/下降
在保持相对平衡的状态下,加大扭矩,提升升力,当升力超过机身本身的重量时候就可以上升。反之降落也是,降低转速,利用重力下降
前后左右移动
大概原理如下。
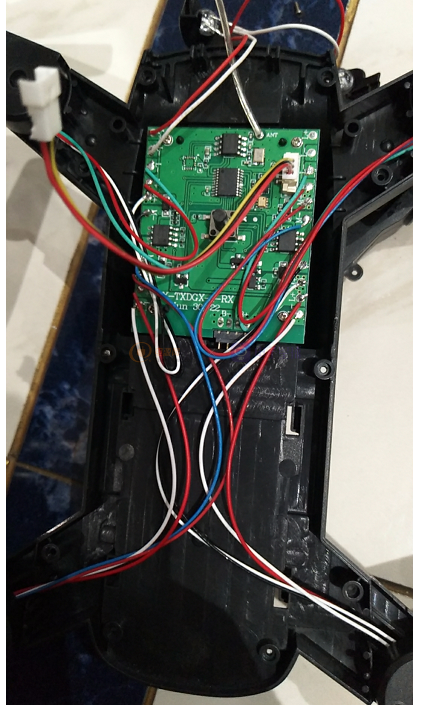
在来一个开箱图》