
前言:在昨天晚上成功把bode100的测试数据导入到matlab中进行闭环控制器的设计后,今天我实际测试了由这种设计方法得到的闭环控制参数的真实性能,并取得了不错的效果,方法可见:《提取环路测试数据进行系统闭环控制参数设计》。
从上次找大佬借仪器测试基于time shift control方法的数字电流模式LLC的环路数据后,因为测试出来的穿越频率仅为220Hz,这么低的低频增益引发我的一些思考,我在那篇文章里面写过,我怀疑是实际c2000环境中的调制器(频率振荡器)的增益不同,引起了被控对象和开环增益较低的问题,具体内容可见:《基于TSC电流模式谐振变换器的数字化实现与环路测试P5》。
所以在PLECS环境中借由C2000 PWM模块来模拟C2000的现实中的实现并测试从周期寄存器上的频率扰动到输出电压的频率响应。主要的考虑是需要写入好几百的数字到周期寄存器用于改变开关频率,不同于在simlpis环境和现实中模拟控制器使用mA级的电流来产生百KHZ的PWM,简而言之就是两者振荡器的控制到频率输出的增益有很大的区别。

(PLECS环境中使用C2000PWM模块模拟TSC控制)
频率响应测试:
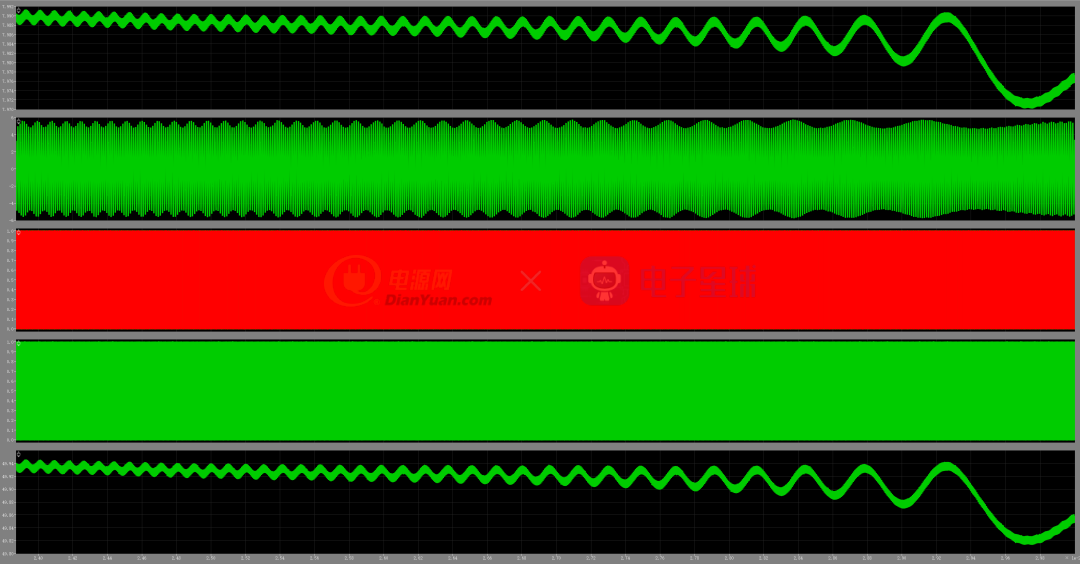
(扫描控制到输出电压的频率响应)

(控制到输出电压的频率响应)
可见PLECS环境中仿真的数据与实际测试的开环增益减去闭环控制器的影响后的被控对象相比,其增益和相位差异并不大,这也反证了使用环路分析仪测试的数据的正确性。
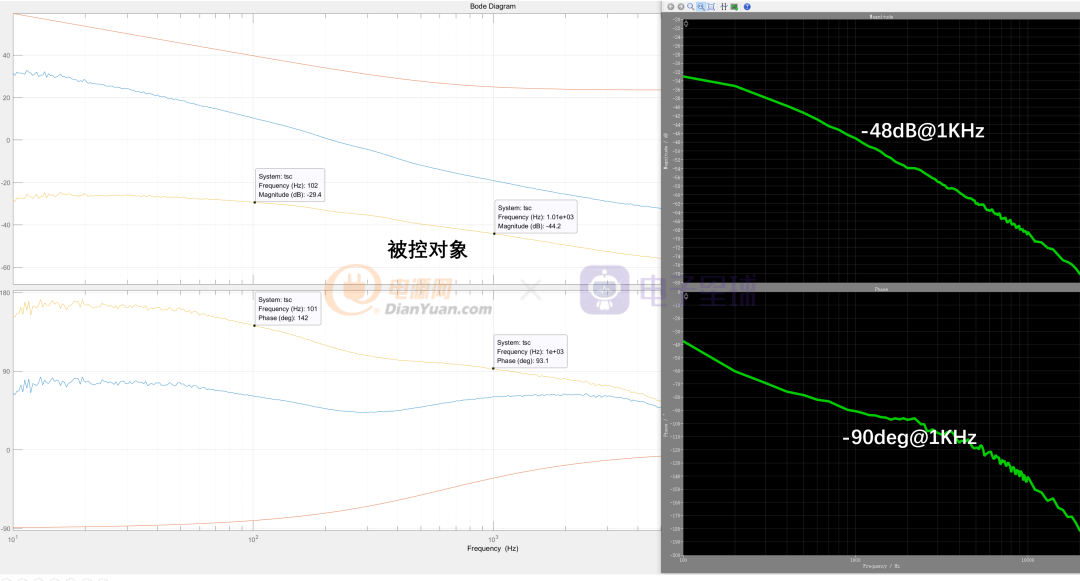
(对比分析环路扫描数据)
至此,我基本可以认为在这个工作点(G=1.0,48V/400W)上,基于TSC方法的数字电流模式控制LLC的被控对象是准确的,然后设计好的闭环控制器的参数为:kp = 200.0; ti = 4e-4; fc = 5500; 控制器的传递函数为:pifs = kp*(1 + 1/(ti*s))*(2*pi*fc/(s + 2*pi*fc)); 是PI控制器串联一个在高频的低通滤波器,用于模拟在模拟控制上常用的type2的实现,其bode可见:

(PIF闭环控制器)
在这组闭环控制参数与系统被控对象的开环传递函数为:Fc = 1.3KHz,PM = 60deg。

(系统开环增益)
把这组参数写入控制程序中,并进行动态负载测试,(G = 1.0, 48V/40W~400W)测试。(电子负载比较差,不能主动设置电流斜率)。测试波形见下图,其中加载跌落为0.733V,按百分比为1.52%,调节时间1.25ms左右。抛载电压上冲0.408V,按百分比为0.85%,调节时间6ms左右。
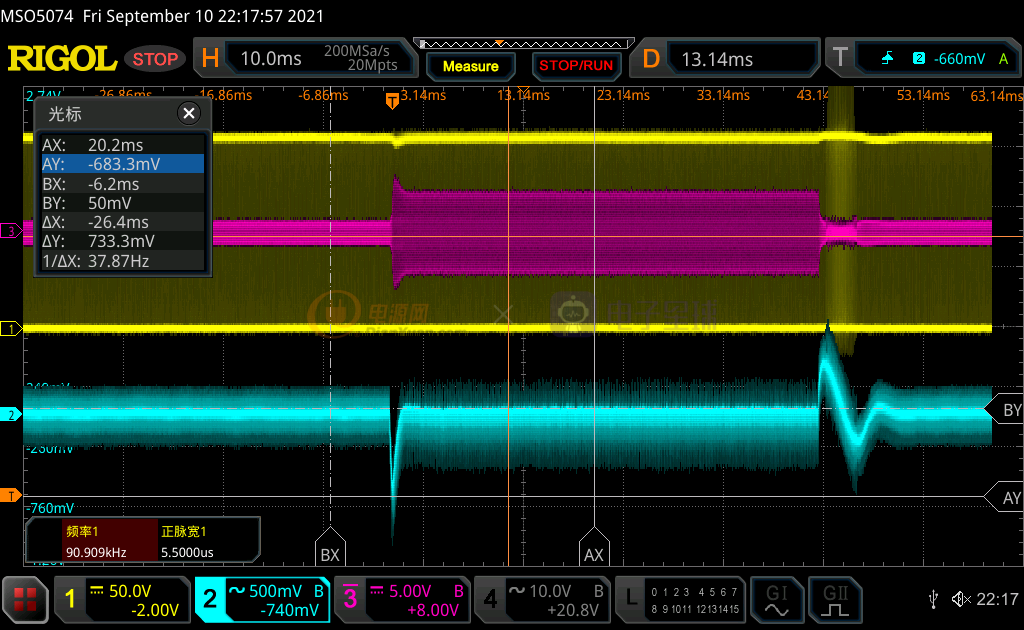
(动态负载测试)

(动态负载:加载)

(动态负载:减载)
小结:经过一段时间的思考,实现了将环路测试数据导入matlab分析的方法,并借由这种方法得到被控对象后进行了准确的闭环控制器的参数设计。然后引入控制器参数实际测试了系统的动态性能,检验了整体设计思路的正确性。
感谢观看,感谢支持,如果有错误恳请帮忙指出,谢谢。