我们在做一些码垛项目时,一般就示教几个基本位置点,其他的码垛位置点都是在基本位置点上进行偏移计算的,所以有时为了方便我们会把几个基本位置点放在一个程序里面,但是其他的程序也可以任意使用这些位置点。

正常我们创建的Modul,例如上图的A,B,C三个程序,除了里面的Home位置点是全局的,其他的点位都是局部的。(Home点是在Config.dat文件中定义的)。
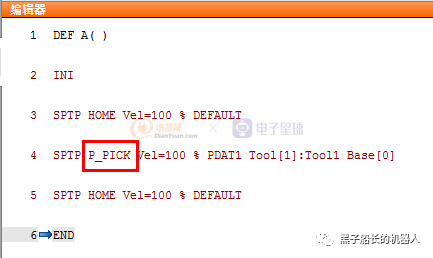
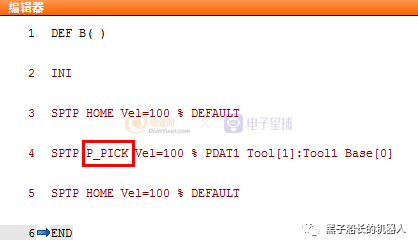
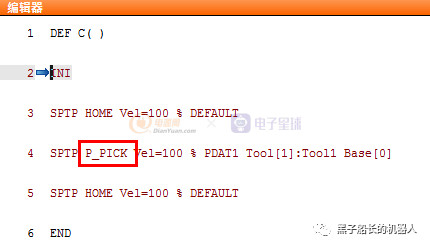
上图A,B,C三个程序中的P_PICK是局部位置点,修改任意程序中的P_PICK位置点都不会改变其他程序中的P_PICK的位置信息。
那么怎么样创建全局的位置点呢?
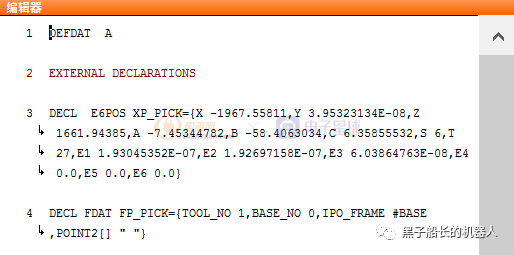
在创建Modul时会生成两个文件src和dat,在src文件中进行程序编辑,添加运动指令记录机器人位置点,所有的位置点都在dat文件中生成具体的位置信息。
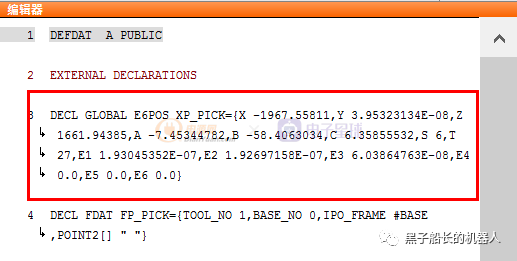
那么,首先定义dat文件为公用的(PUBLIC),再定义位置点为全局的(GLOBAL),如下图所示处理,把A定义为全局的。
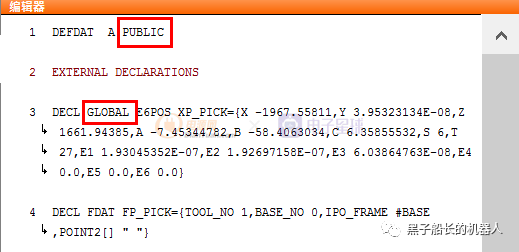
这样A,B,C三个程序中的P_PICK位置点就是同一个位置点,修改任意程序中的P_PICK位置点都会改变其他程序中的P_PICK的位置信息。
注意注意:
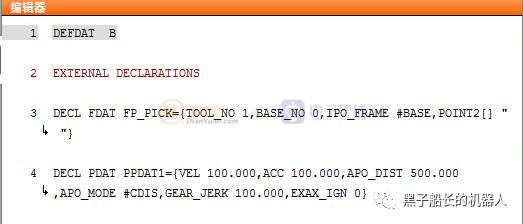
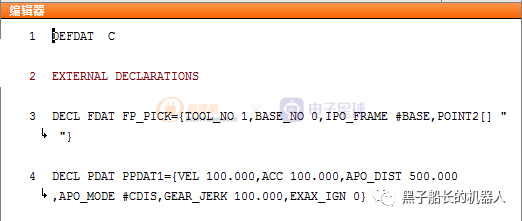
一定要先把程序定义为PUBLIC和需要的点定义为GLOBAL,再在其他的程序中进行使用此位置点。从下图中,不知道大家能否看出什么???
B和C中的P_PICK没有位置信息。