
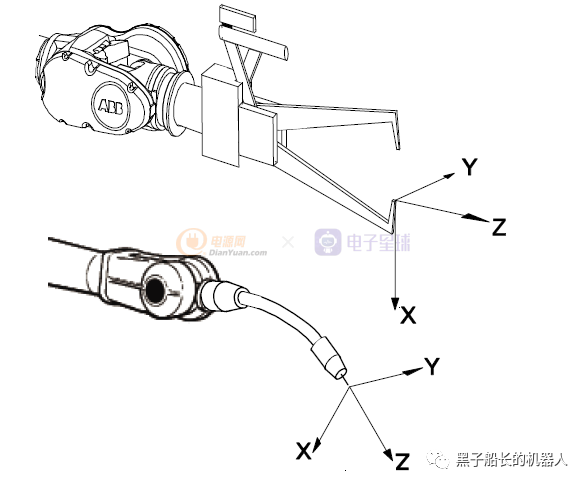
ABB机器人工具坐标系
FANUC机器人工具坐标系
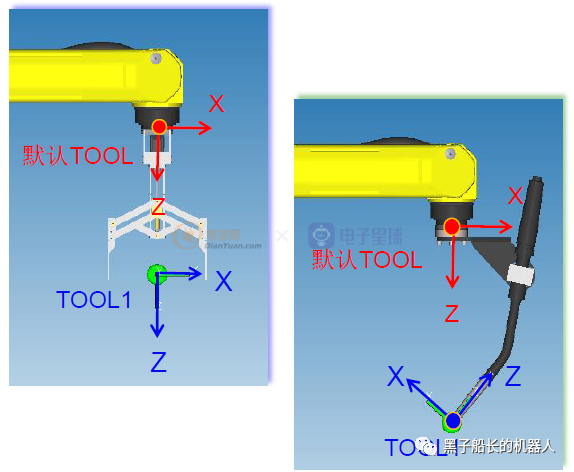
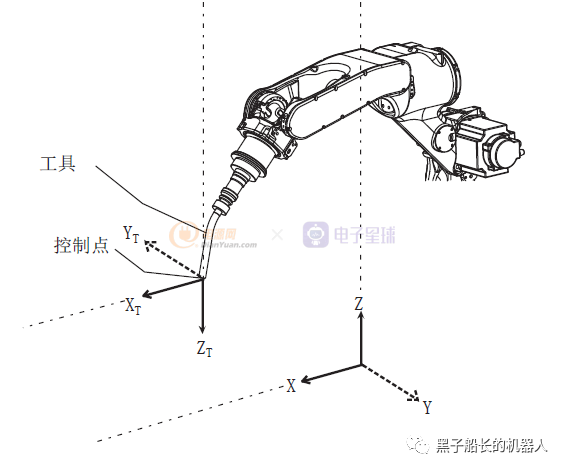
安川机器人工具坐标系
KUKA机器人工具坐标系
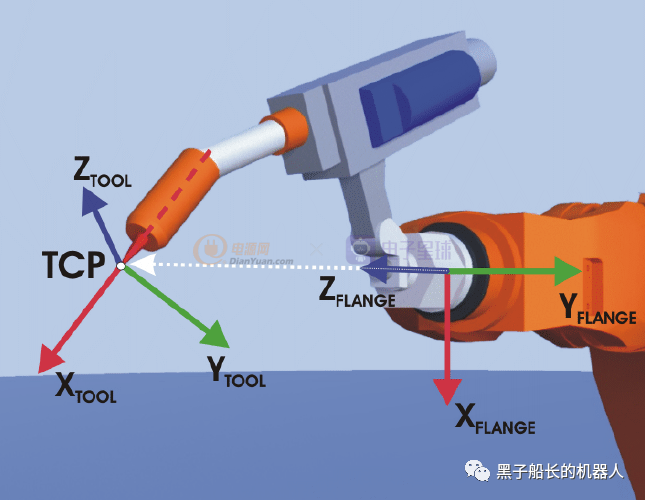
上面的四大家族均以弧焊的焊枪作为工具来说明工具坐标系,是因为焊枪比较具有代表性的能说明工具坐标系的用途,那么从上面可以看出ABB,FANUC,安川工具的作业方向基本都是Z方向作为工具的作业方向,唯独KUKA是以X方向作为工具的作业方向。
这样可能对习惯使用其他机器人进行示教编程时造成不便或误操作撞机,因为大部分人习惯性的使用按键Z来调整工具在作业方向,而KUKA机器人是使用按键X的。
为什么是这样呢?
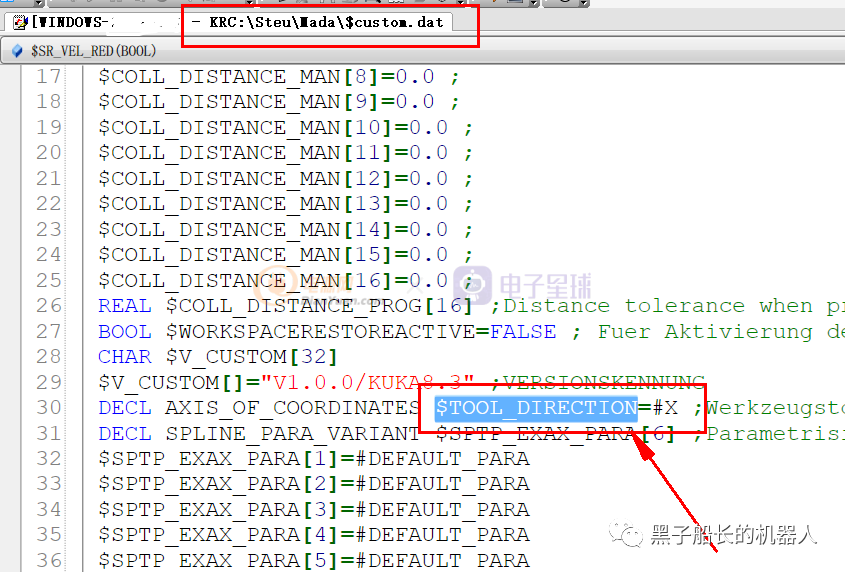
其实默认情况下,在KUKA系统中将X方向确定为工具的作业方向。我们可以通过改变系统变量$TOOL_DIRECTION更改作业方向的定义。在目录KRC\Steu\Mada的文件$Custom.dat中将系统变量$TOOL_DIRECTION的值更改为所需要的值,有#X(默认),#Y,#Z。
注意:无法通过变量赋值或通过写入从程序中更改$TOOL_DIRECTION的值,以及作业方向必须在定义测量和创建程序前确定。之后更改会有想不到的惊喜。