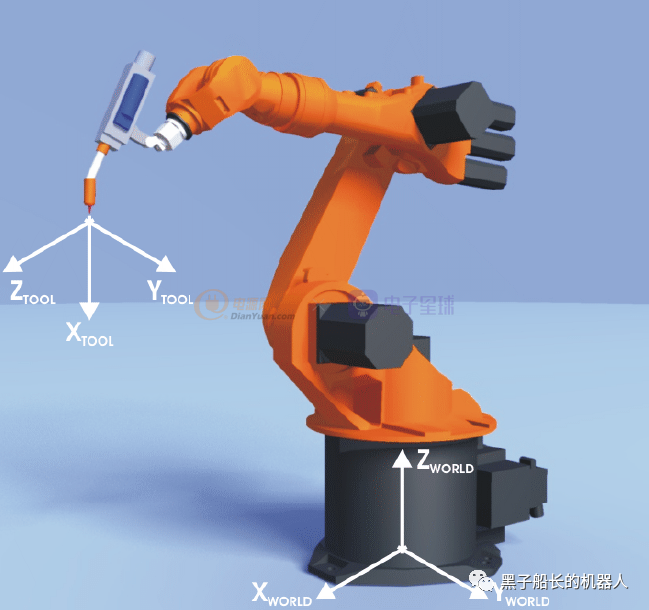
我们常用的机器人的工具坐标系坐标系是机器人手持工具,TCP的数据包含位置数据(X、Y、Z)和姿态/朝向数据(A、B、C),这两个数据都是相对于默认法兰坐标系的偏移值或旋转角度。机器人手持工具定义TCP的方法主要有两种,一种是示教法(XYZ 4点法、XYZ 参照法、ABC 世界、ABC 2点法),一种是数据直接输入法。

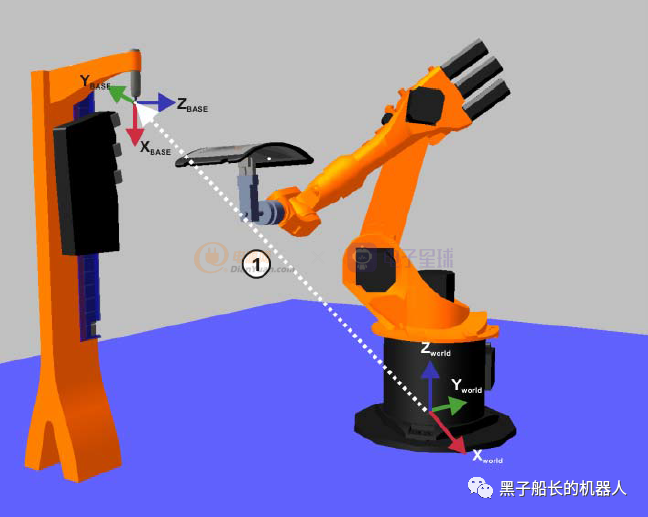
对于机器人手持工件的外部TCP(KUKA机器人称为固定工具)如何进行定义呢?
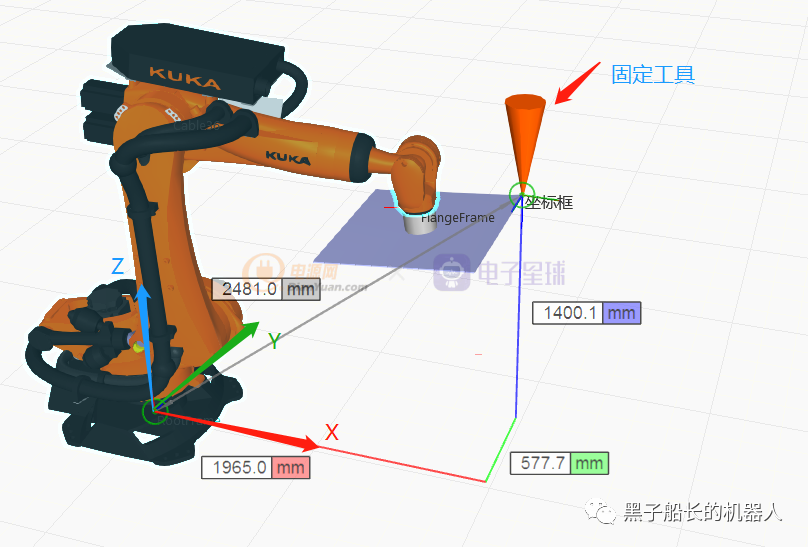
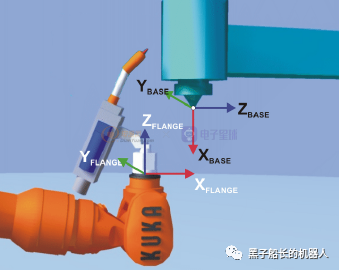
其实我们还是可以从坐标系包含的两个数据来说明:1、位置数据(X、Y、Z),其实固定工具坐标系的位置数据就是固定工具的TCP在机器人世界坐标系(机器人底座中心)中的位置,通过下图可以看出X值为1965.0mm,Y值为577.7mm,Z值为1400.1mm。
2、姿态/朝向数据(A、B、C),如果不进行数据设置的话,方向如上图所示方向,也就是与世界坐标系的方向相同。当然可以根据实际固定工具坐标系的方向进行修改ABC的值,这里可以联想一下机器人手持弧焊焊枪的ABC的值。
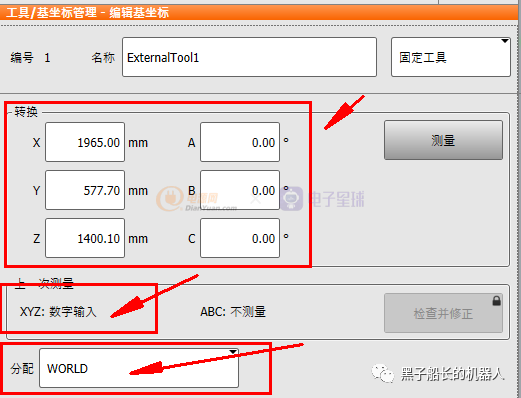
以上我们是理论数据(仿真中测量获得,实际不太方便测量的)获得的固定工具坐标系TCP的位置数据的,也就是所谓的直接输入法。
那么对于示教法,我们怎么进行操作呢?
测量固定工具
固定工具的测量分为 2 步:
测量固定工具的 TCP,确定固定工具的外部 TCP 和世界坐标系原点之间的距离。 如果测量数据已知,则可将其直接输入。
测量工件 :直接法和间接法。
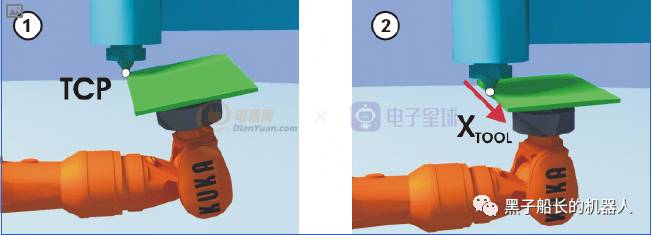
1、测量外部 TCP说明:
首先,将固定工具的 TCP 告知机器人控制系统。为此用一个已经测量过的工具移至 TCP。之后,将固定工具的坐标系取向告知机器人控制系统。为此用户对一个已经测量过的工具坐标系平行于新的坐标系进行校准。有两种方式: 5D:只将固定工具的作业方向告知机器人控制器。该作业方向被默认为 X 轴。其它轴的姿态将由系统确定,对用户来说,不是很容易地就能识别。6D:所有 3 个轴的姿态都将告知机器人控制系统。

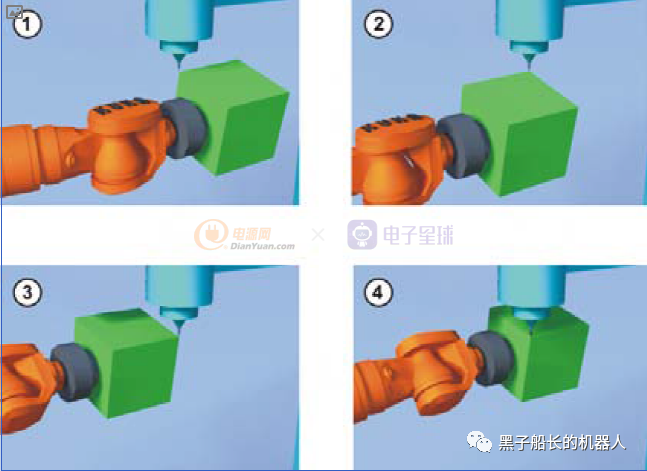
使用已知工具TCP对准外部需要测量的固定工具TCP
对坐标系进行平行校准
2、测量工件:直接法
机器人控制系统将根据示教获得工件的原点和其它 2 个点。 由此 3 个点将该工件清楚地定义出来。
前提条件:
- 连接法兰处已经安装了待测量的工件。
- 安装了一个已经测量过的固定工具。

3、测量工件:间接法
机器人控制系统在 4 个点 (其坐标必须已知)的基础上计算工件。将不用移至工件原点。
前提条件:
- 连接法兰处已经安装了待测量的工件。
- 新工件的4个点坐标已知,例如从CAD中得知。
- TCP可达到这4个点。
- 安装了一个已经测量过的固定工具。