
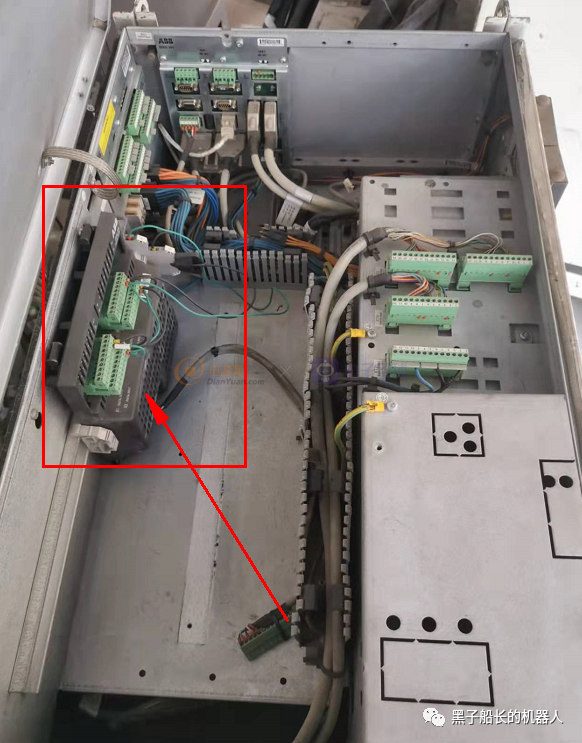
近期偶得一台ABB机器人,看了控制柜,没见过,比较老旧就没多看她几眼,就这么随她去了。不曾想,今个闲来又经过她的身旁,忍不住又多看了她一眼,还是好奇想看看她到底如何,然后掀开她的盖头,发现还有一块IO板卡,于是就有了如下的测试啦。

控制柜正面
制造日期:2001-09-19
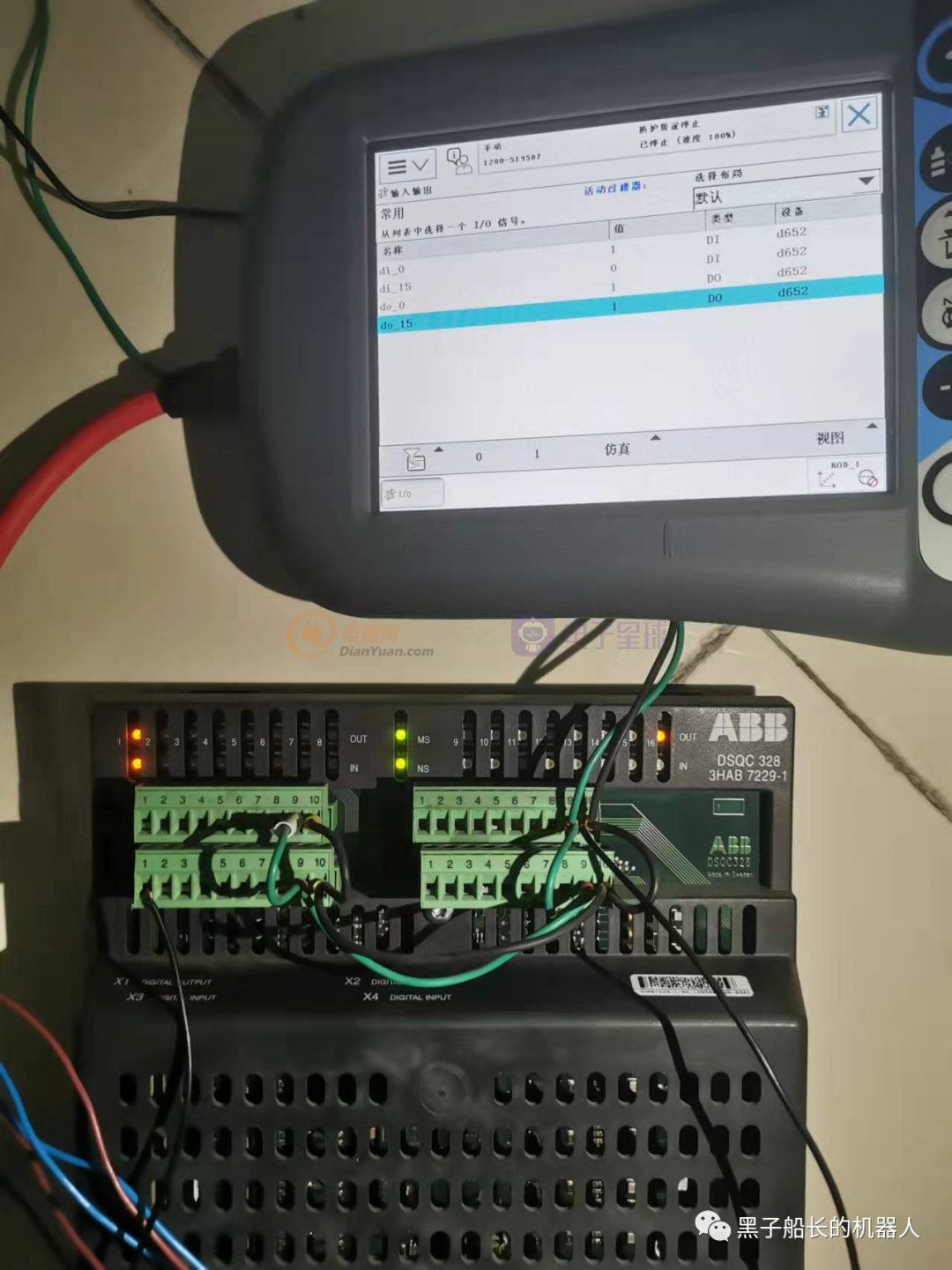
主角:DSQC328看到这块板子,我们先来简单看看接口情况:
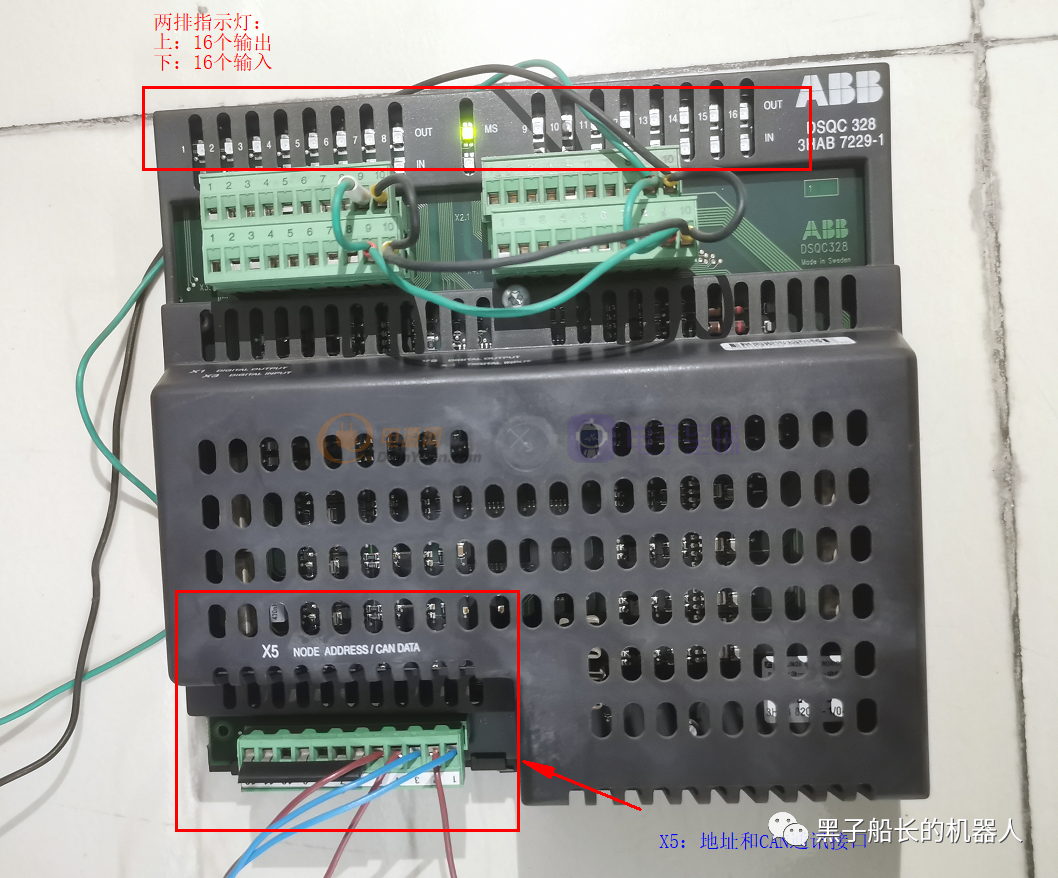
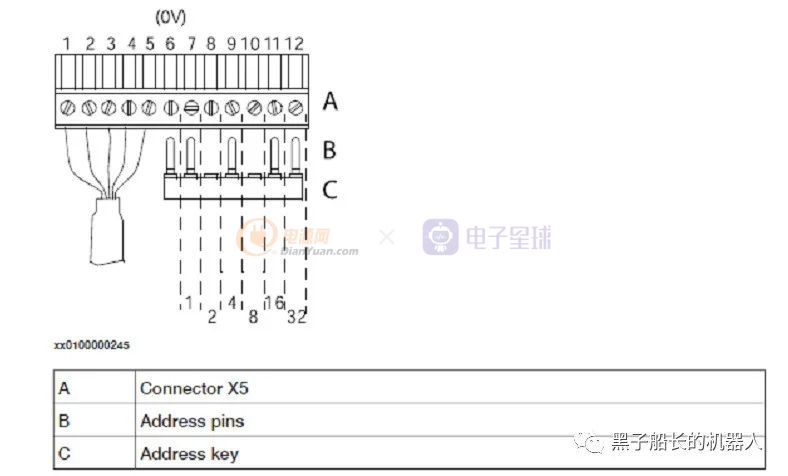
根据输入输出数量(16进16出)以及几个接口情况,与DSQC652完全一致啊,于是直接按照DSQC652的接线和配置来了:1-确定地址,拆下X5上的短接片,与下图一样6-12设置地址,地址默认的也是10,但是我测试的小柜子自带一个DSQC652默认地址也是10,为了地址不重复冲突,我就把7号针脚给剪掉了,那么地址就是11了。
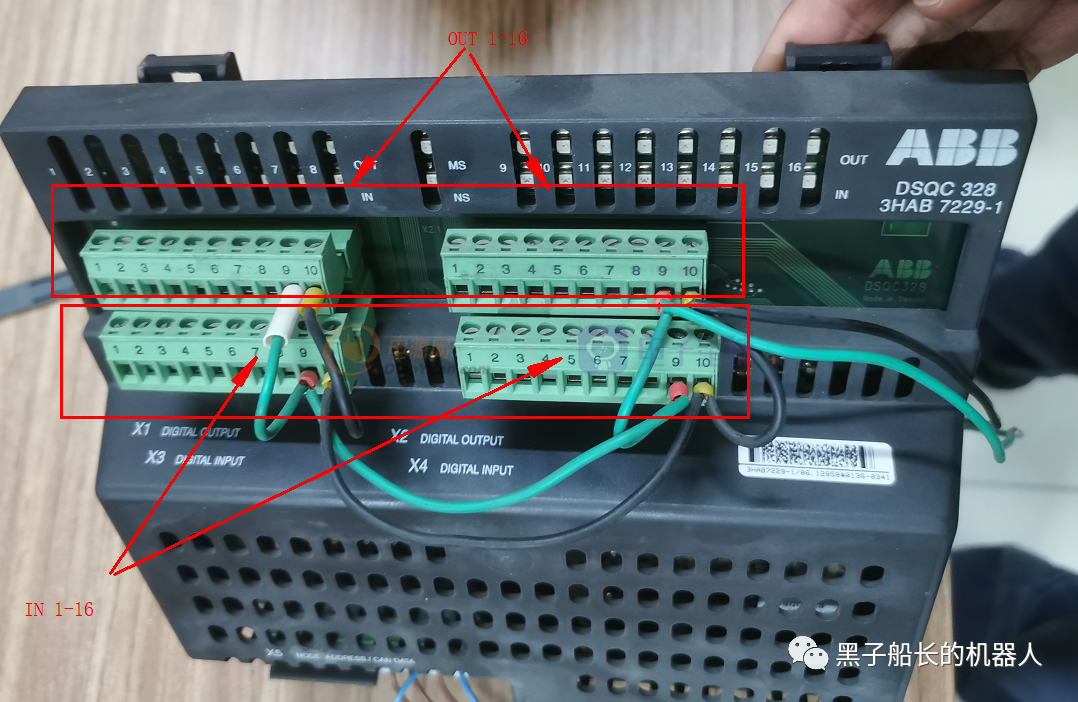
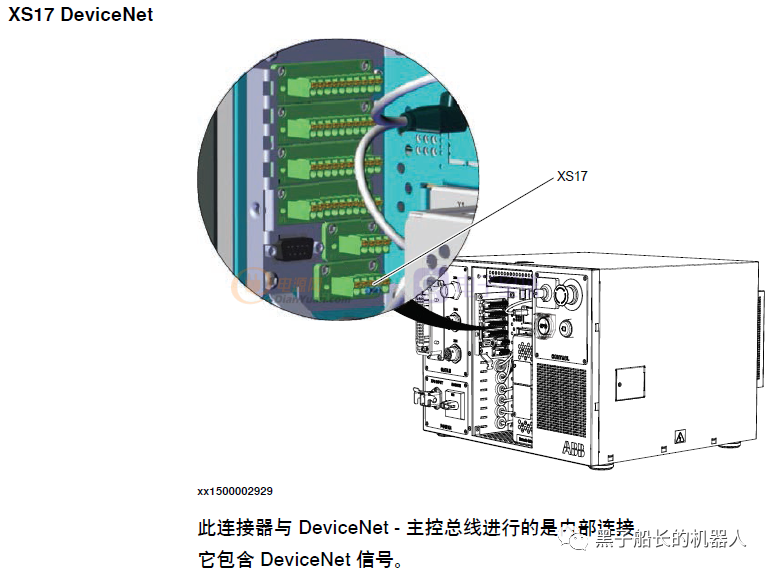
2-CAN通讯接线,X5端子排1-5为CAN通讯接口,连接到小柜子的XS17 DeviceNet接口上,X5上的1-5与XS17的1-5,一一对应连接上就可以,注意XS17S的2-3之间的电阻不要拆除。

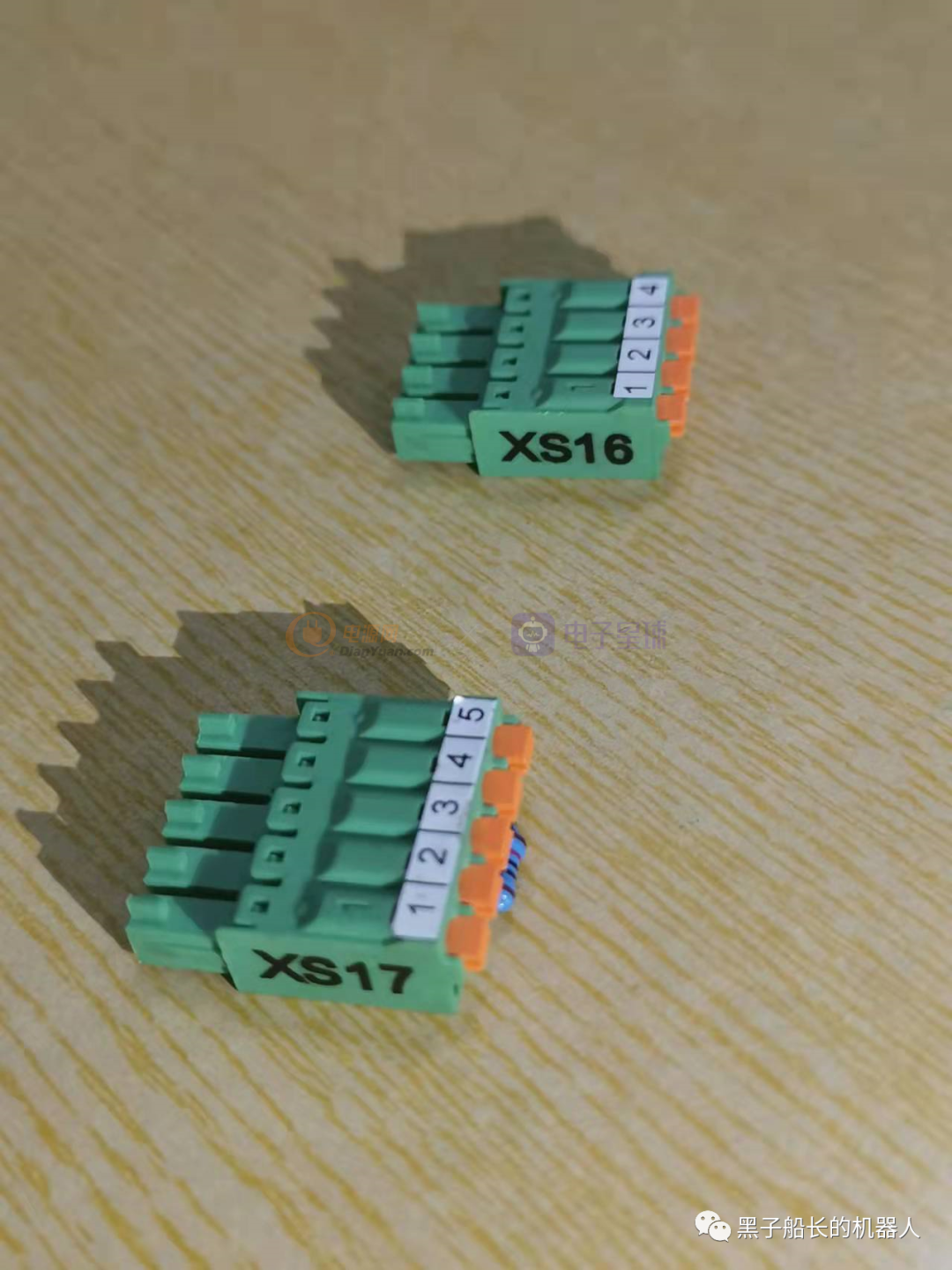
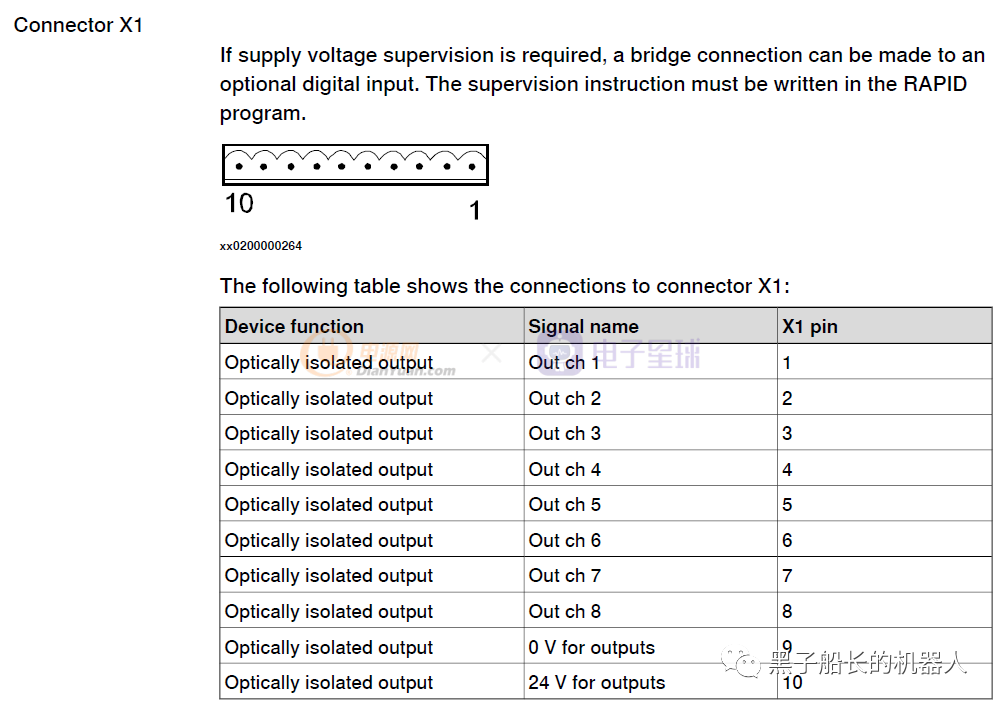
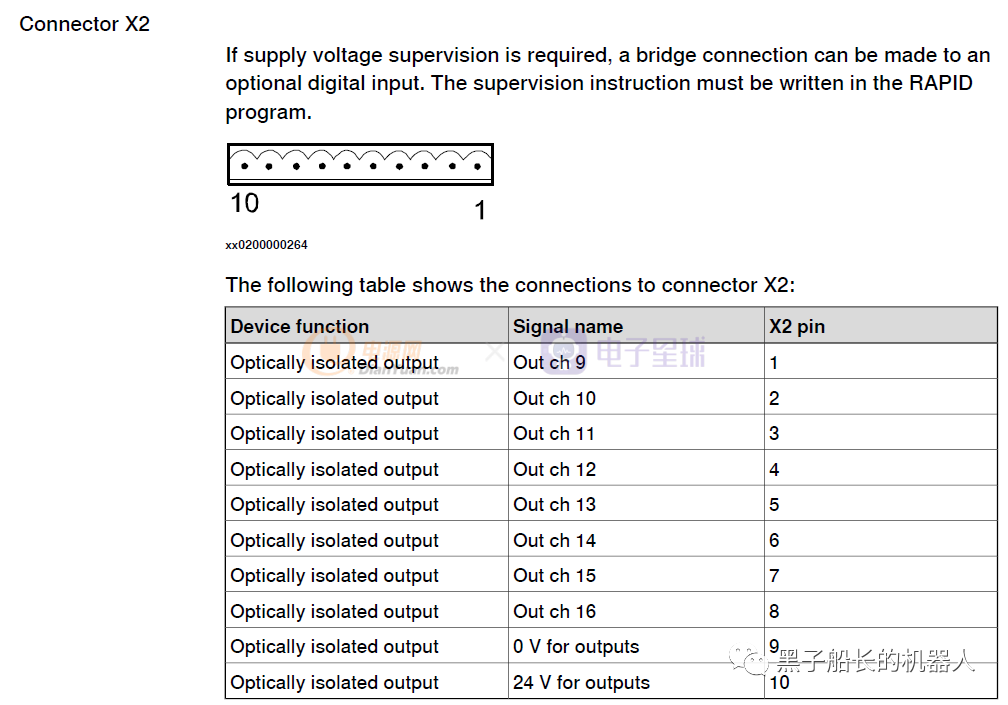
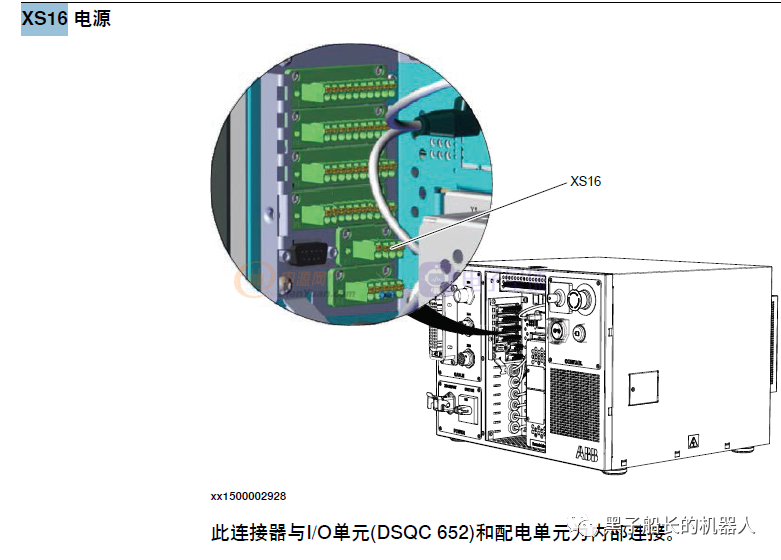
3-输入输出接线完全与DSQC652完全一摸一样,输出端X1和X2的24V电源从小柜子的XS16上接过来。

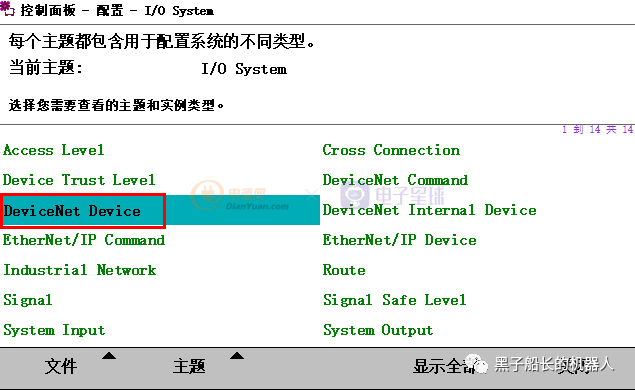
4-示教器中的配置,既然完全和DSQC652完全一摸一样,那么在配置DeviceNet Device从站时从提供的模板中直接选择DSQC652应该可以,但是多年的搞机经验告诉我肯定还是有问题的。
首先直接选择DSQC652作为模板,更改Adresss为11,直接重启看看。

果不其然有报警,不要慌,先看看报警信息,产品编号不匹配,当然不匹配,这是DSQC328

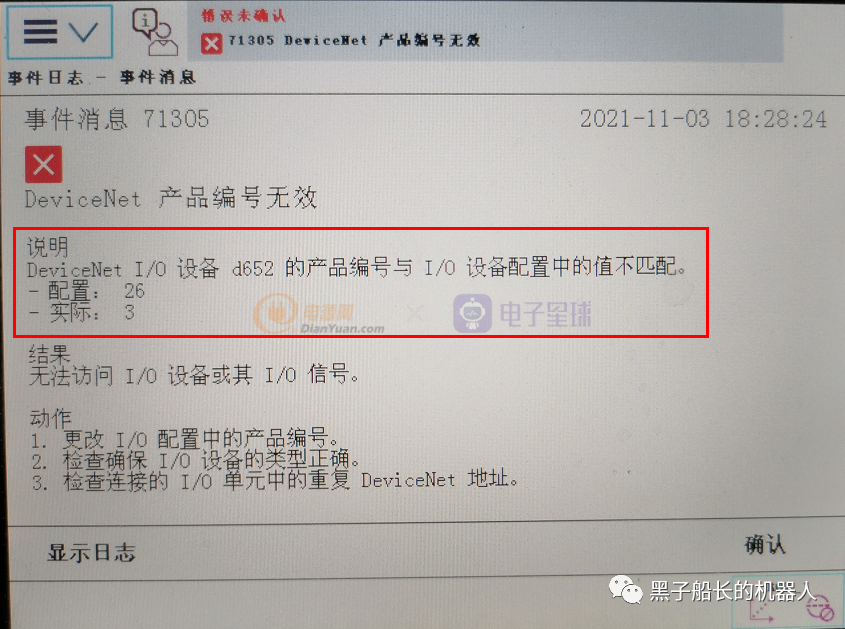
那就把产品编号由26改为3,再重启看看。

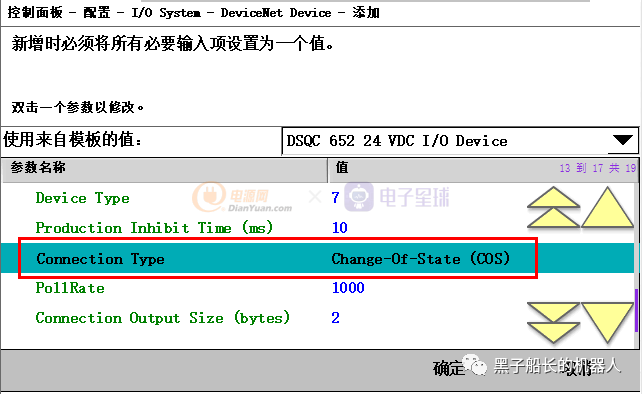
我去,还有报警......“不支持COS连接”,小意思盘它......
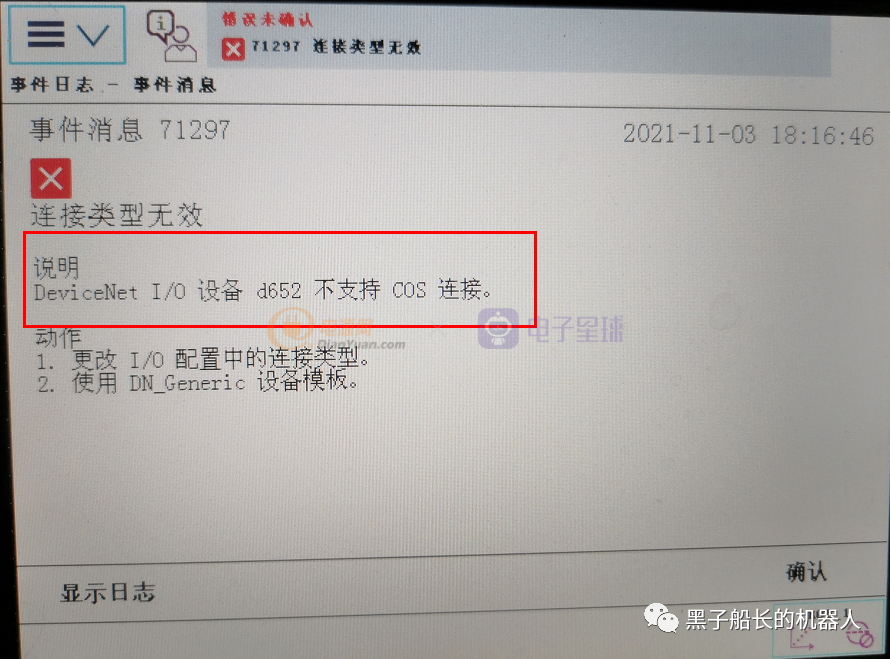
把Connection Type的Change-Of-State,更改为Polled,在重启。

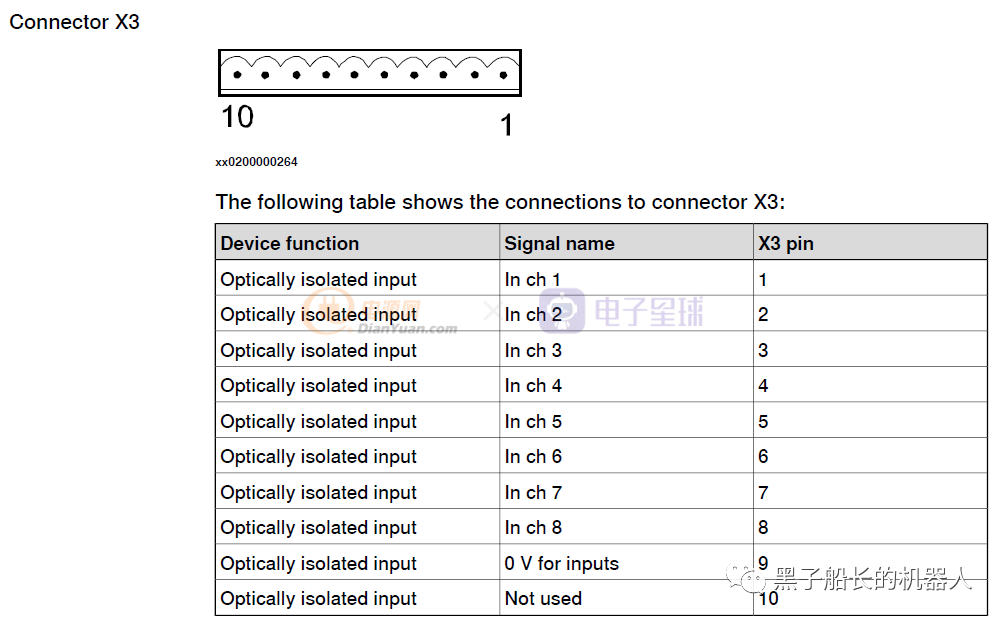
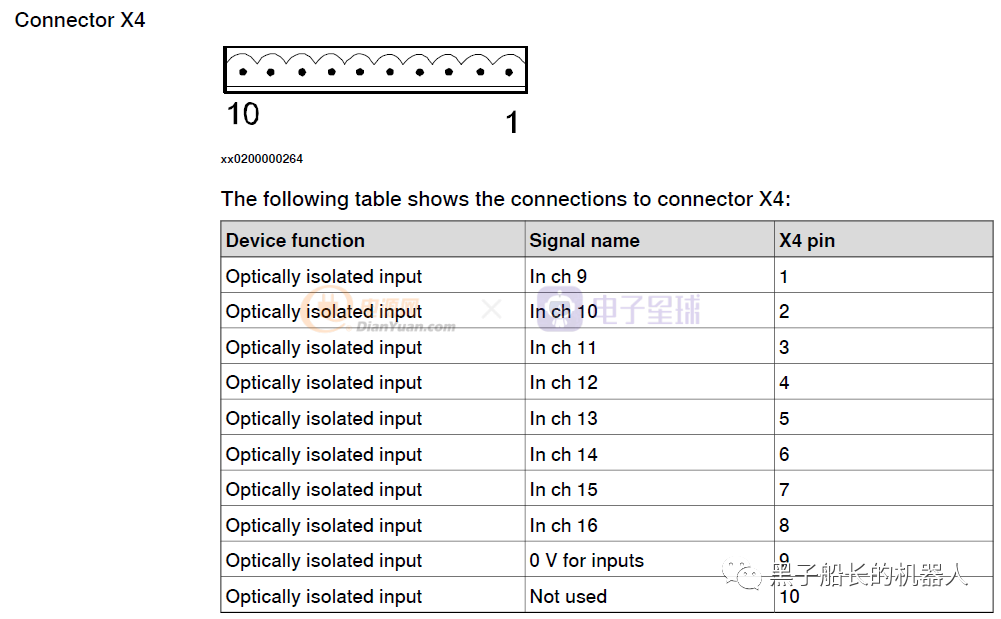
没有报警,OK,通讯成功,接下来就是按照正常配置信号输入输出信号就可以了,输入输出接线也完全与DSQC652一毛一样,不在此赘述了。
只因在人群中,多看了,你一眼......再也不能忘记你容颜......技术这玩意有时需要,举一反三,拓展思维,主动思考,先自行查阅资料解决问题,这样才能触类旁通,突飞猛进。。。。。。