前提:机器人作为服务器
软件使用:
EPSON RC+ 7.0
SocketTool
步骤:
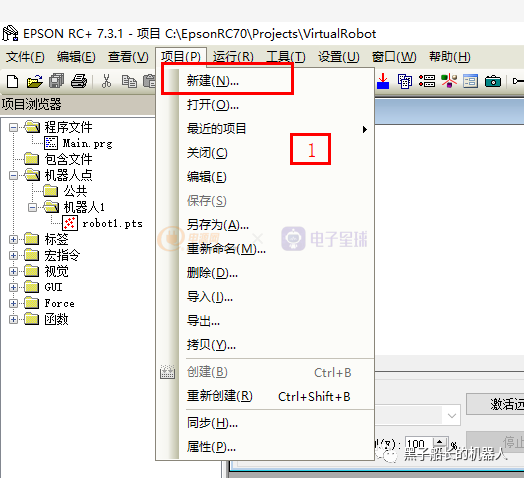
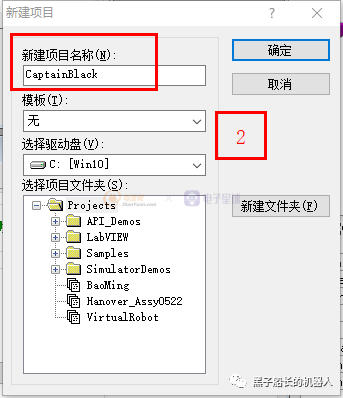
1、使用EPSON RC+ 7.0建立一个虚拟机器人系统;
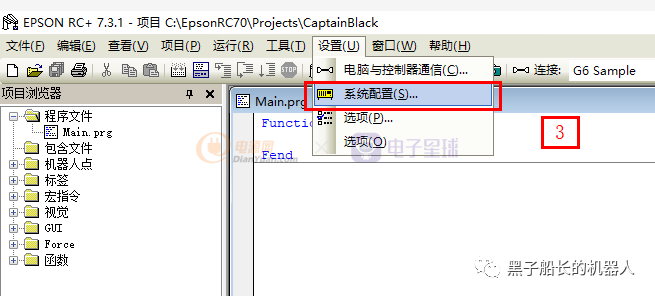

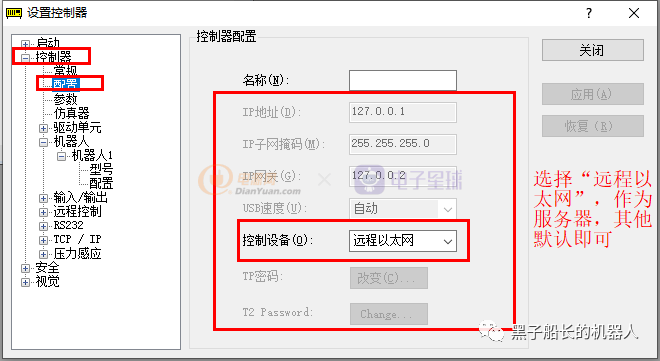
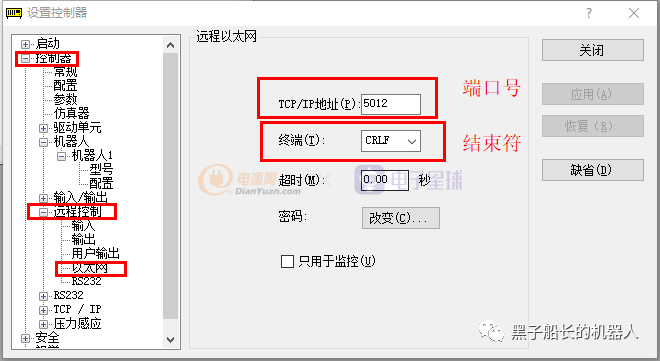
2、以太网 IP 及端口设置、控制设备设置;
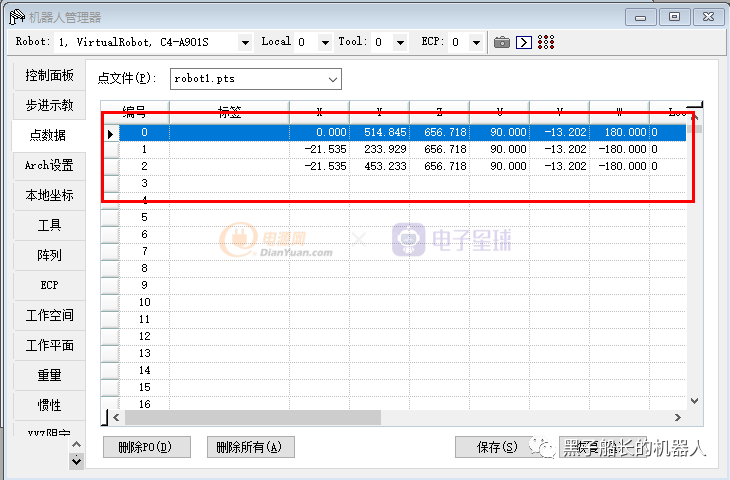
3、打开机器人操作面板,电机上电,示教机器点位;


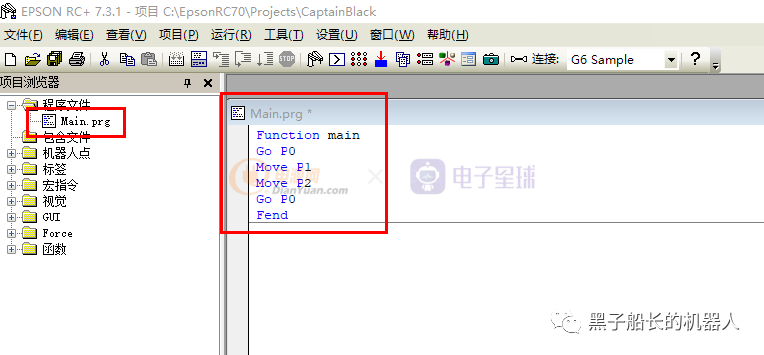
4、编写main程序,简单的轨迹程序;
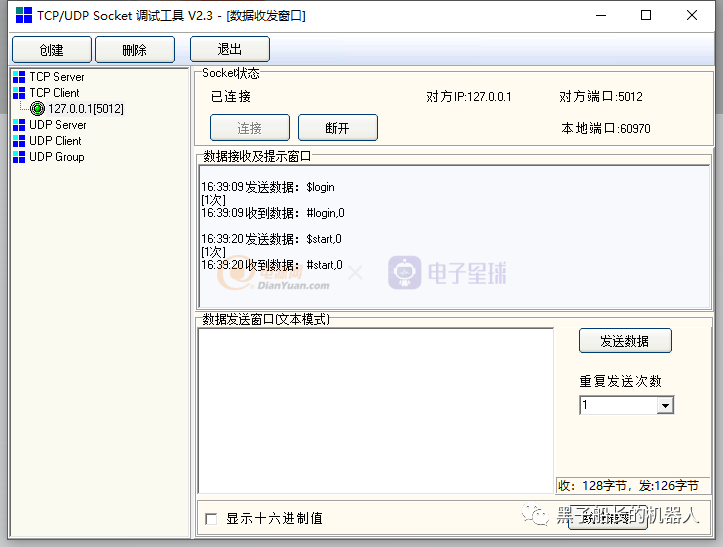
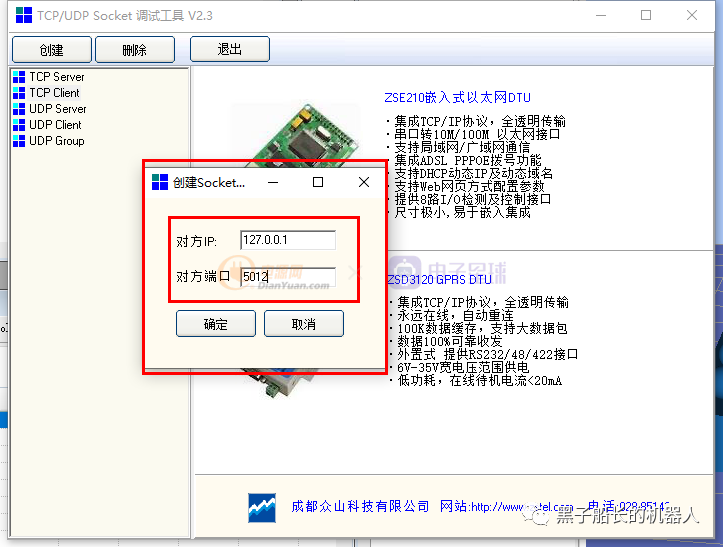
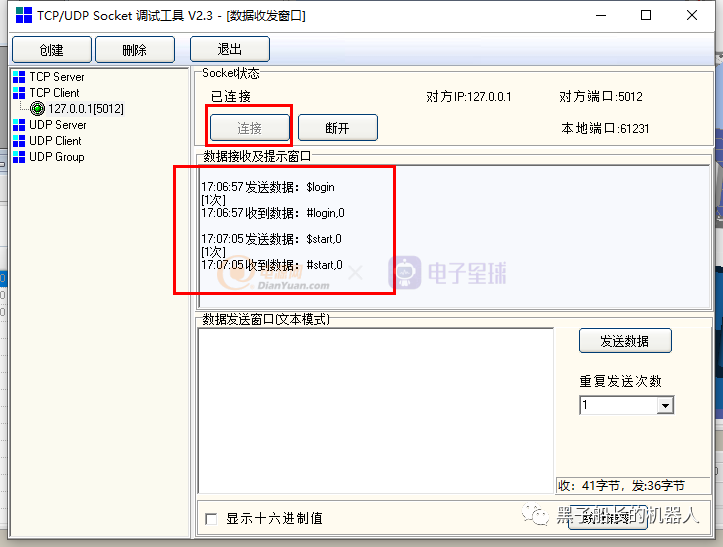
5、TCP/IP 调试助手作为客户端,IP和端口号(与第2步对应)
6、EPSON RC+ 7.0激活远程控制
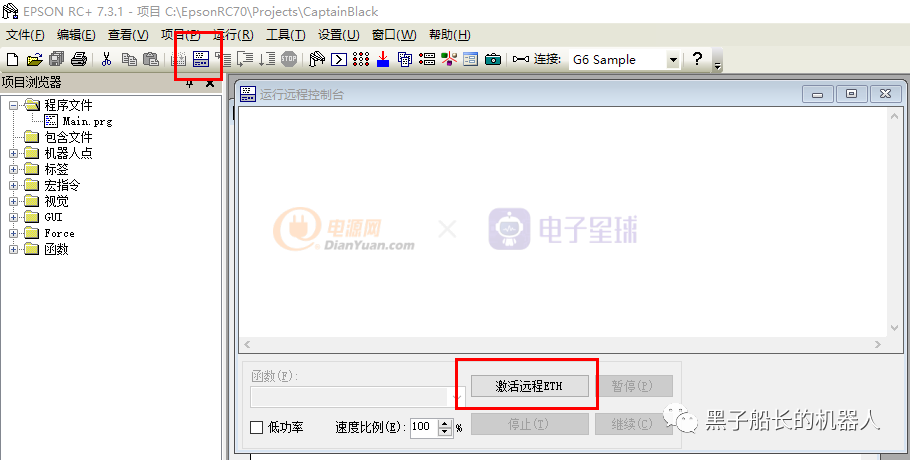
7、TCP/IP 调试助手进行连接,并发送控制指令,启动main程序;注意输入指令后要回车换行。
- $login(登录)
- $start,0 (启动main程序)
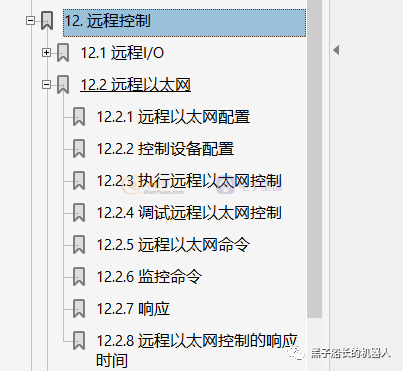
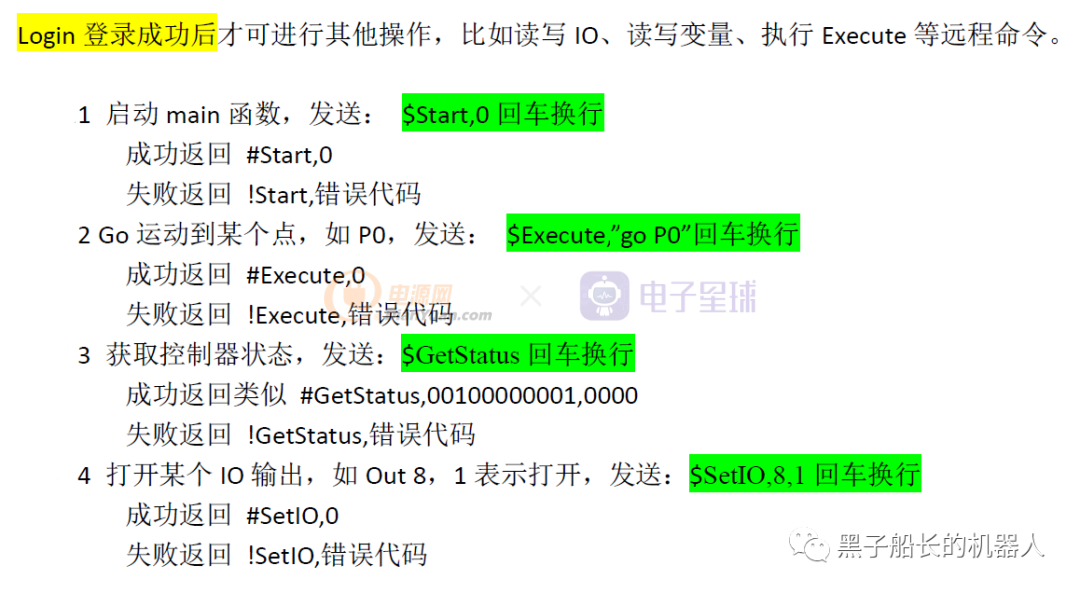
8、远程控制指令
注意:在使用任何远程命令前,务必使用远程命令 Login 登录,如下:发送格式:$Login 回车换行;
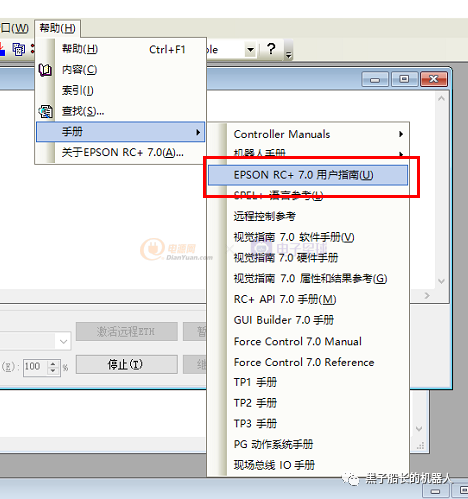
9、如需了解更多远程命令及参数,请查阅软件自带的用户指南手册