
KR AGILUS fivve 系列机器人
手臂上的接口说明
接口说明
A4 轴上的接口
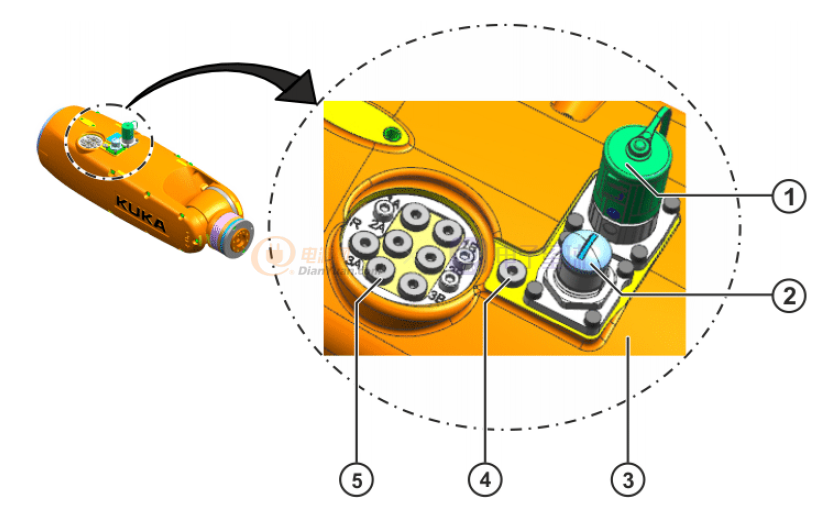
1-接口X41
2-接口XPN41
3-机器人腕部
4-空气管路AIR2
5-空气接口
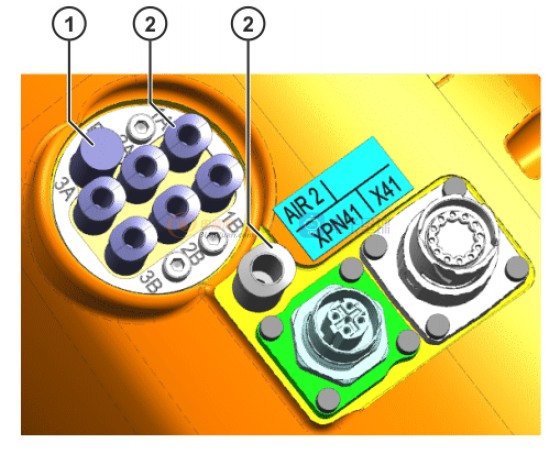
1-消声器
2-气管快速插头(外径6mm)
三组 双电控 两位五通
电磁阀
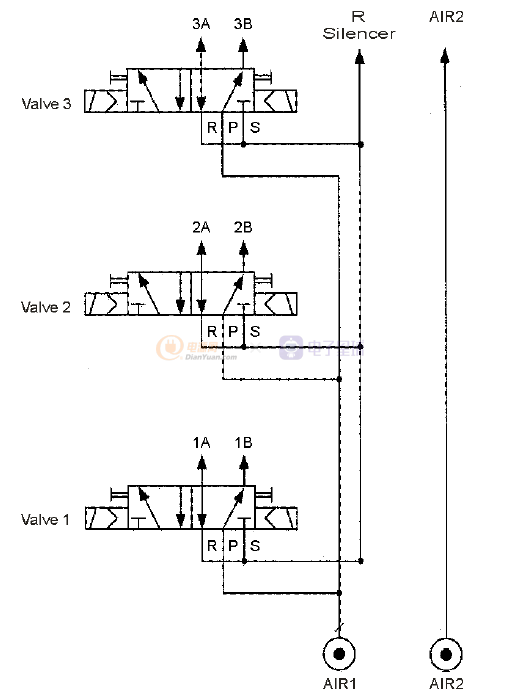
机器人内置3组 双电控两位五通电磁阀,工作参数如下:
1-最大工作气压:7bar
2-开关频率:10Hz
3-工作温度:+5 °C to +45 °C
5-螺纹规格:M5
6-电压:24V DC
7-电流:25mA
信号定义和配置
3组电磁阀控制信号
Valve 1: DO7/DO10
Valve 2: DO8/DO11
Valve 3: DO9/DO12
输入输出信号默认系统没有配置,需要用WorkVisual进行配置。
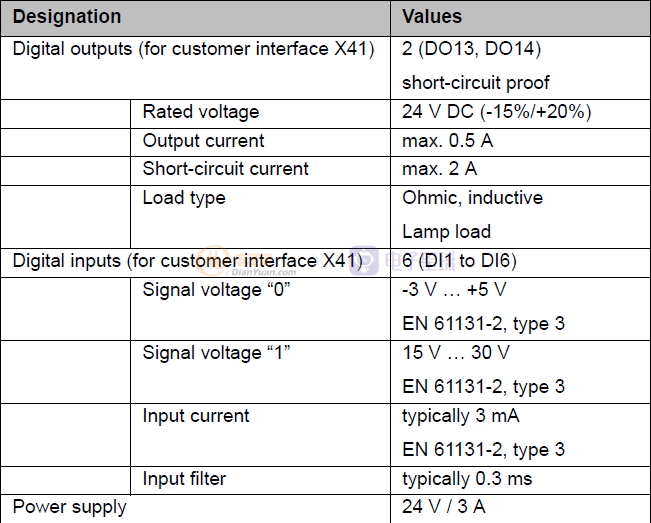
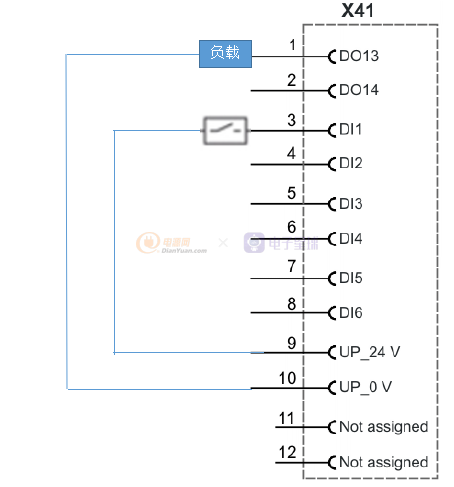
X41(12针)用户输入输出接口

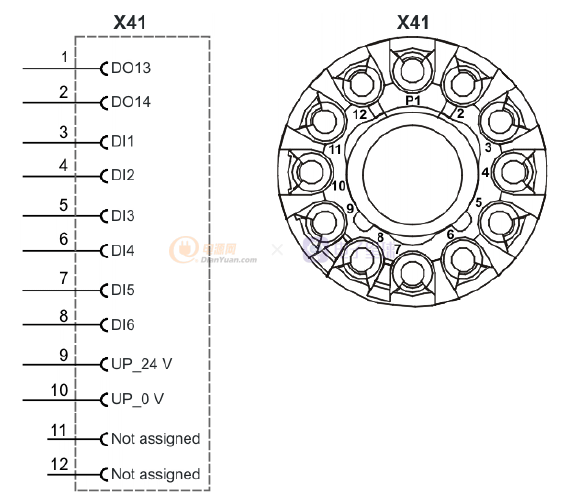
接口参数:6个输入信号,2个输出信号
接线图:
WorkVisual信号配置:
EM8905-1001 I/O-Modul
输入信号配置:

输出信号配置:
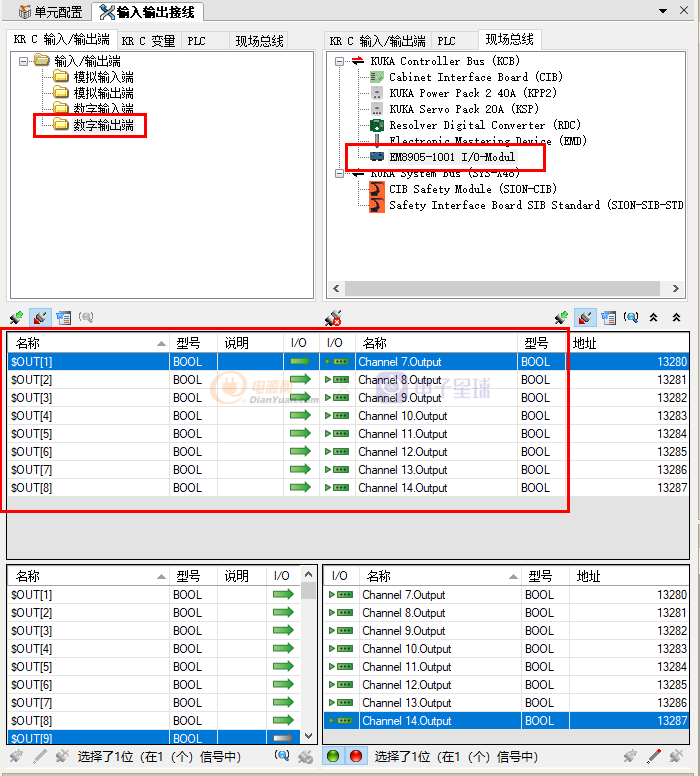
按照上图信号映射:
Value1的两个控制信号:OUT[1]/OUT[4]
Value2的两个控制信号:OUT[2]/OUT[5]
Value3的两个控制信号:OUT[3]/OUT[6]