
本文转自徐飞翔的“einsum的基础使用”
版权声明:本文为博主原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明
einsum全称为Einstein summation convention,是一种求和的范式,在很多基于多维张量的张量运算库,如numpy,tensorflow,pytorch中都有所应用。einsum可以用一种很简单的,统一的方式去表示很多多维张量的运算。让我们以numpy中的einsum为例子,理解这种运算表达方式。
这里贴出numpy中的einsum的API:
numpy.einsum(subscripts, *operands, out=None, dtype=None, order='K', casting='safe', optimize=False)
其中关键的参数有subscripts用于指定计算模式,operands用于指定操作数,我们给个例子,如果现在我们有两个矩阵
A = np.array([[1,2,3],[1,3,4],[2,3,4]])
B = np.array([[9,2,4],[1,1,7],[5,2,4]])
'''
A -> array([[1, 2, 3],
[1, 3, 4],
[2, 3, 4]])
B -> array([[9, 2, 4],
[1, 1, 7],
[5, 2, 4]])
'''
如果我们现在想实现一个运算,如下公式所述:
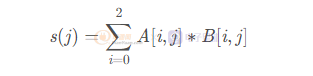
我们利用einsum这种形式就能够很好的表达,如:
s = np.einsum('ij,ij->j',A,B)
其输出结果为
array([20, 13, 56])
其中的subscripts参数就很好地描述了上述公式描述的运算过程,我们这里可以细究下这个参数。这个参数由三大部分构成,a,b->c其中a和b是描述的输入张量的索引,如上面的ij表示A和B张量的i行j列。c表示的是输出的索引,如上文中的j。当你指定了输出的索引之后,就可以把这个索引看成是固定的值了,因为他将会是作为一个自变量参数存在的,而可以把其他的索引变量(输入的索引变量)看成是循环变量。这个方式可以实现很多复杂的矩阵运算,如
a = np.arange(60.).reshape(3,4,5)
b = np.arange(24.).reshape(4,3,2)
np.einsum('ijk,jil->kl', a, b)
Reference
[1]. EINSUM IS ALL YOU NEED - EINSTEIN SUMMATION IN DEEP LEARNING