
大家好,我是电源漫谈,很高兴和各位一起分享我的第8篇原创文章,喜欢和支持我的工程师,一定记得给我点赞、收藏、分享。
加微信[13764329639]与作者微信及进群沟通交流。
前述文章中我们有介绍,闭环控制的必要性及闭环控制稳定性的分析,我们知道了需要闭环控制去维持输出对负载变化或者输入电压变化的调整能力,另外还要考虑控制的快速性,稳定性。那么,一般来说,具体是如何实现闭环控制呢?实现方式有哪些呢?由于实现闭环反馈控制,首先要采样一个被控制量,而被控制量,一般分为电压和电流两种,因此,控制模式也分为电压模式控制和电流模式控制。在本文中,我们来讨论一下各种典型控制模式及其优缺点。
一.电压模式控制
电压模式控制是历史悠久的控制模式,它的诞生早于电流模式控制,典型控制框图如图1,所示。
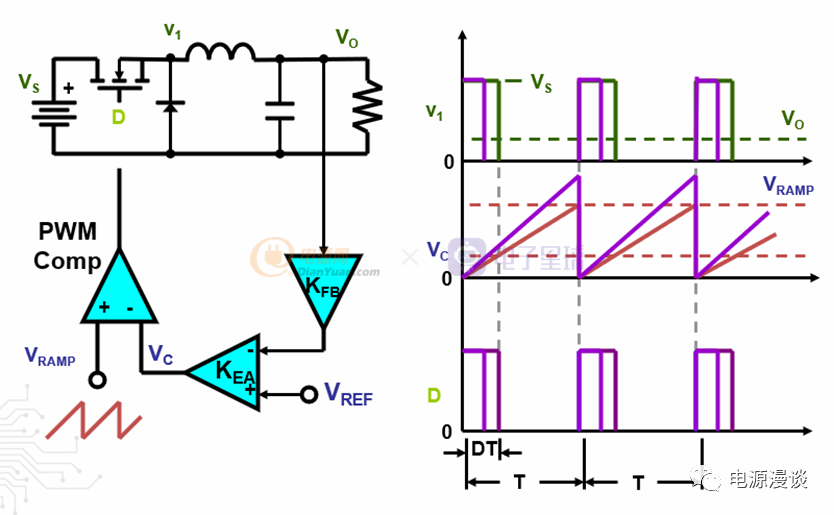
图1 电压模式控制原理框图
简单介绍一下电压模式控制的原理,电压模式控制是一个定频的控制模式,通过一个固定频率的时钟产生固定的开关频率,同时有一个斜坡电压和开关频率同频率用于产生控制信号的比较标准,在斜坡开始时输出开关脉冲信号。
由于被控制量是输出电压,因此对输出电压进行采样,期望的输出电压作为基准,二者比较产生控制误差,这个误差信号就作为PWM比较器的输入和斜波比较,斜波电压超过误差信号时,开关管关断,这样通过调整误差放大器的输出电压,就可以调整占空比大小。
电压控制模式有什么样的优点呢?
首先,它是一个定频的控制,这是一个基本的特点。其次,控制回路中的信号都不是来自于功率电路,尤其是比较基准斜坡信号,它是一个幅值比较大的稳定信号,因此不容易受到噪声信号的干扰。另外,它只有一个被控制量,输出电压,所以只要通过一个误差放大补偿网络就可以实现占空比的控制,相对来说电路比较简单。并且其比较基准斜坡,是一个固定频率的稳定的,大的且不受干扰的信号,所以占空比调制的抗噪声能力很强。
但是,事物都是具有两面性的,它的缺点也是存在的。由于只有一个被控制量,因此不管是输入电压还是输出负载变化等这些典型的动作或者干扰,都需要输出电压产生变化后,经过采样比较放大后,才能被PWM调节器处理,去修补占空比,进而输出滤波器电压被调整,最后输出电压被调整回来,这个过程需要一定的时间,相对来说比较慢速,因此过流保护等需要额外的电路对过流做出快速的关断。
最后,由于输入电压对环路增益的影响,所以需要采用前馈的方式去改善输入电压对增益的影响。
在电压模式控制中人为加入输入电压前馈后,使斜坡信号和输入电压成正比,无需电压控制环作用就可以改变纠正占空比,所以加了电压前馈后的电压模式控制对输入电压的响应更快,且维持了整个电压范围内固定的环路增益,这种措施弥补了电压模式的部分缺点。
由于输出低通LC滤波器形成双极点,所以误差放大补偿网络需要对两个低频双极点进行处理,所以补偿过程比较麻烦,需要补偿网络有180C的相位提升。随着工艺的提高,可以将控制芯片的频率设置的很高(不管是模拟控制还是数字控制),因此可以使用较小的输出电感和输出电容,以此得到较高的LC转折频率,以便提高环路的带宽。
二.峰值电流模式控制
由于电压模式控制有上述的一些缺点,电流模式控制在20世纪80年代诞生了。这种控制模式除了对输出电压控制之外,还引入了电感电流信号(或者开关电流),将它作为一个额外的被控制量,这个控制量包含在输出电压控制环内,作为一个快速的控制环,这时,电流信号就得到了控制。虽然电路需要增加一些元件,比如采样电流等,但是其带来的好处还是很多的。
首先,由于引入了电流控制环,负载电流的任何变化,就直接在电流环响应,控制环路比电压模式响应更快了。另外,有了电感电流信息,就可以很方便做逐周期的电流限制及过流保护,不需要额外增加过流保护电路或者逐周期限流电路。此外,这样的控制电路就像一个电压控制电流源,通过电压外环得到电压控制误差量,它作为电流环的基准,使得电流得到了直接控制,这种架构允许多个电源通过一个电压环去并联,各自的电流环就可以得到很好的均流。
最后,在增加电流环后,由于电压环对电感电流进行钳位,所以电感的极点作用就被去除了,所以电路由电压模式控制的二阶LC滤波器环节变为一阶RC滤波环节,需要一个二型补偿器就可以将它的特性补偿好,而电压模式控制需要三型补偿器才可以,这无疑简化了补偿电路环节,更方便得到快速的环路带宽。
电流模式控制,除了具有一系列优点之外,它还有一些不足之处,如全范围的稳定性,及抗噪声干扰性能等,我们接下来会再进一步讨论。电流模式控制有多种形式的变形,如峰值电流模式控制,谷值电流模式控制,平均电流模式控制等。我们先讨论一下电流模式控制的一种典型形式,即峰值电流模式的结构,如图2所示。
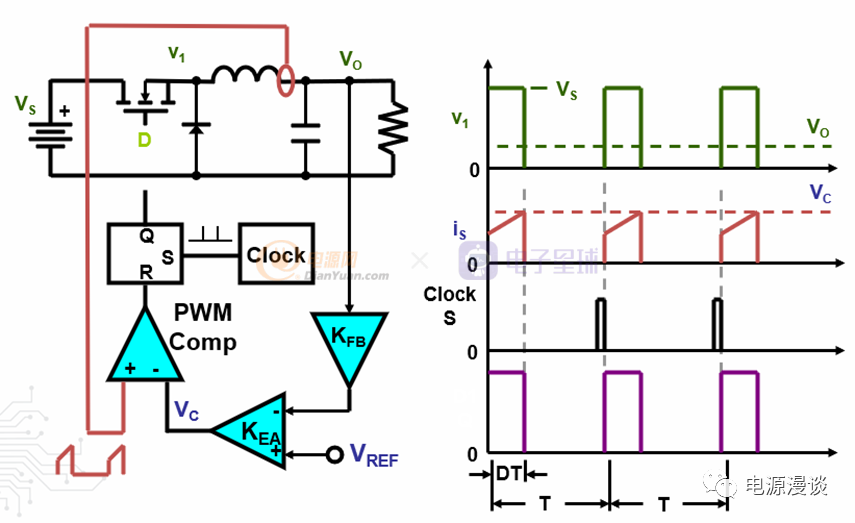
图2 峰值电流模式原理框图
在峰值电流模式控制中,它直接将电感电流作为斜波信号,去和电压环误差输出信号相比较,产生占空比下降沿,而上升沿是通过一个时基信号产生周期性的上升沿信号,并且通过RS触发器锁存导通状态。而在电压模式控制中,采样的斜坡是固定的锯齿波信号,它是芯片自己产生或者制作的一个斜坡信号。
一旦电流的峰值达到误差电压值,比较器就会动作,占空比的下降沿就产生了,所以对于电流的变化,这个响应是直接的,而无需通过输出电压的变化被采样到而后再通过控制环响应,这使得电路的控制更快速,如图3所示,本来在电压模式控制中需要加的前馈电路,在峰值电流模式控制中,由于采样电流斜坡和输入电压成正比,所以它天然就存在电压前馈了,电压的变化可以直接在电流环中得到响应。
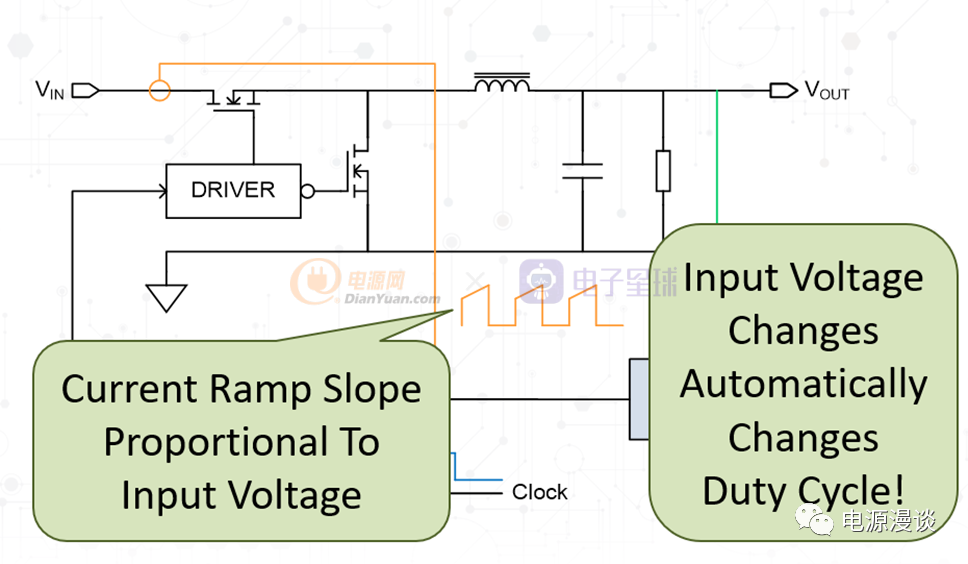
图3 峰值电流模式的前馈作用
再聊一下电流采样电路,为了得到更小的损耗,一般电路会采用很小的电阻串联在开关上去得到采样电流信号,这样得到的电流采样信号很小,虽然效率尽可能地提高了,但是由于小的电流信号来自于功率电路,很容易受到噪声干扰,同时也会将噪声引入控制电路,让电路控制变得敏感,所以采用CT或者电流采样运放,在中大功率电路产品中更为普遍。
在峰值电流模式中,不得不提一下其中一个典型的问题,那就是斜坡补偿问题,当占空比大于50%时,会产生次谐波振荡,振荡频率为开关频率的一半,使得每个开关周期的电流起点不同,但是外部看来的平均电流确是恒定的,如图4所示。
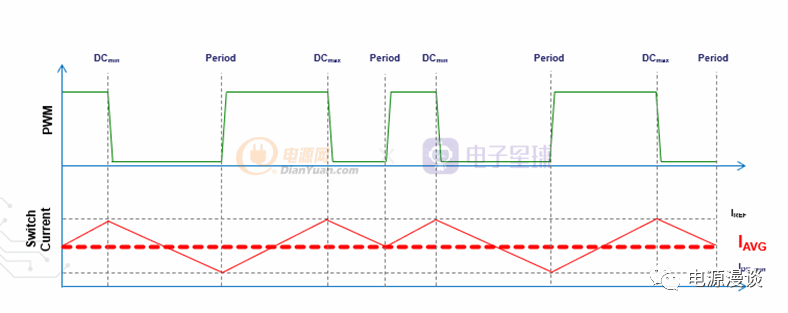
图4 占空比大于50%时的次谐波振荡
由于这个不稳定状态的出现,所以在电流信号和电压环误差比较之前,需要在电流信号上加上人工斜坡,以避免这种次斜坡震荡,如图5所示。
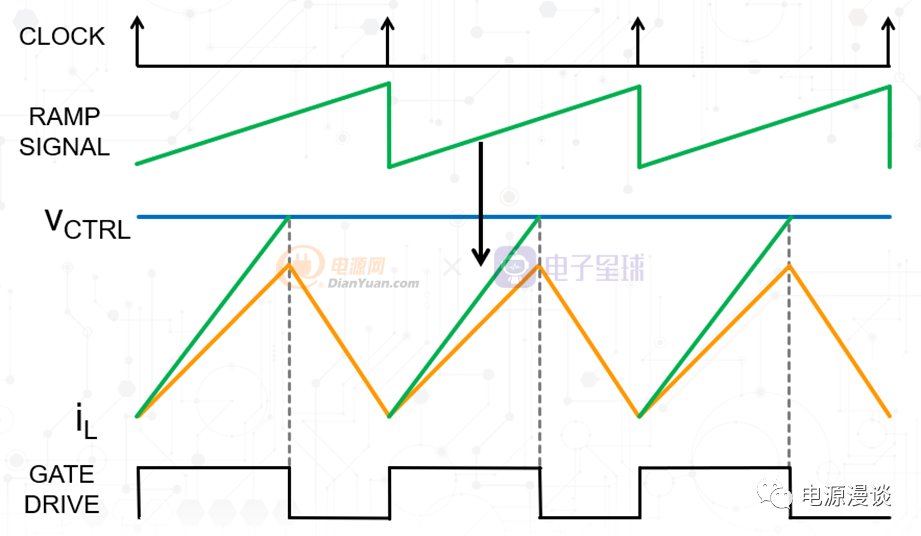
图5 斜波补偿示意
峰值模式电流控制中,另外一个典型的现象是开关导通瞬间的脉冲尖峰,如图6所示。由于变压器寄生参数或者整流管反向恢复问题的影响,开关导通瞬间的电流尖峰会比较高,如果此时就进行电流和误差电压比较,则可能出现误关断,所以在控制上需要避开这段时间,这就是LEB时间(LeadingEdge Blank)。
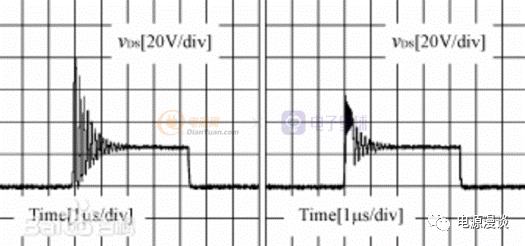
图6 开关导通电流尖峰示意(来自网络)
具体实施方式上,可以在芯片外在采样电流之后就加一级RC滤波电路,将前沿噪声滤除,在前述文章中我们有介绍RC滤波电路的特性,请参考如下前述文章,RC滤波电路的频域及时域特性探讨,也可以在芯片内部设置一定时间的LEB时间,在这段时间内的尖峰噪声在和比较器比较中并不起作用,因此,在控制环路上就出现一个最小导通脉冲的概念,所以,目标电流在最小导通脉冲内是无法进行控制响应的。如图7,是峰值电流模式控制芯片MCP16361的最小脉宽参数。
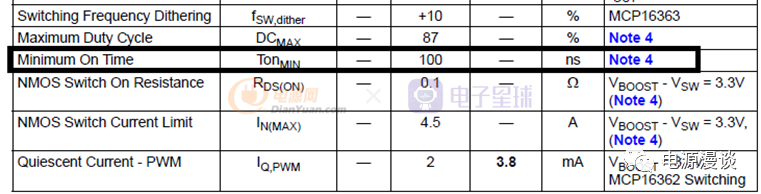
图7 峰值电流模式控制的最小脉宽
另外一个值得一提的问题就是,由于电压控制环强制控制电流环,所以在多输路出应用中,负载的交差调整率比较差,因此需要用耦合电感来实现多输出应用。
和峰值电流模式控制相对应的,还有一种谷底电流模式控制,后续有机会再进行探讨。
三.平均电流模式控制
前述讨论了峰值电流模式控制中的典型的问题,次斜波震荡,这是由于电路输出端看到的是电路的平均电流,而控制环路中被控制的是峰值电流,由于峰值电流和平均电流是不匹配的。当输出电压恒定时,有一种情况是平均电流是固定的,但是每一次开关导通时电流的起点不同,这种情况在普通的恒压控制是问题不太大的,但是如果需要在类似于PFC电路中,需要全面线性的控制电流波形跟随正弦电压,此时需要对电流需要进行更精准的控制,那就需要采用平均电流控制。
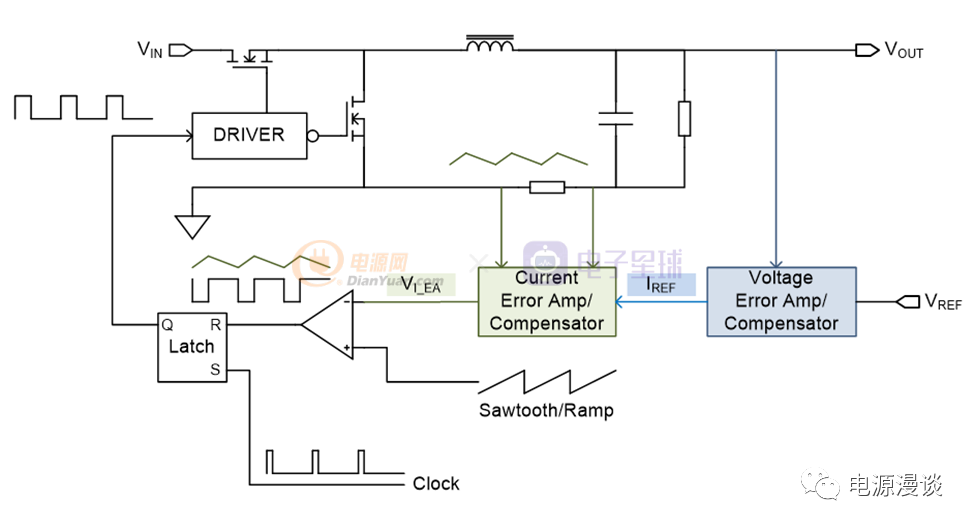
图8 平均电流模式控制原理框图
接下来,我们简要介绍一下平均电流模式控制。类似于峰值电流模式控制,电压外环还是一样的,它作为电流环的基准。由于需要采样平均电流,电路采样需要能采样到整个周期的电流波形,如图8所示,在电感电流回路的低边去采样。
采样电流和误差电压输出比较后,经过补偿和放大后产生电流环误差信号,通过一个固定频率的锯齿波信号和电流环输出误差进行比较,得到占空比控制信号,所以,综合来说,是基于平均电流的误差信号和锯齿波比较产生占空比,在这种架构中,平均电流得到了直接和精确的控制。
在平均电流模式控制中,类似于电压模式控制,存在固定频率的锯齿波信号和电流误差去比较,所以不需要斜波补偿,同时相对于峰值电流模式控制,更不容易受到噪声的干扰,且同时也有更快的动态响应。
四.滞环控制器
除了主流的电压模式控制,和电流模式控制这些线性控制方式之外,还有一些非线性控制方式,如滞环控制器等。
滞环控制器是一种古老的控制方式,它的控制核心就是一个比较器,使输出电压的值和比较器参考电压相比较,当低于最小参考电压时则打开开关管传递能量,当高于滞环决定的最大参考电压时关闭开关管停止传递能量,比较器的迟滞范围就是参考电压的阈值范围。
这种简单的控制方式好处是成本低,控制简单,由于使用比较器作为控制核心,所以对负载的响应很快。由于比较器控制电路是天然稳定的,所以无需补偿电路,节省电路器件。
但是它的缺点也很明显,主要是由于开关频率随着负载和输入电压变化是变频的,所以它无法用外部时钟去同步,由于它的控制核心是比较器滞环比较,所以必须使得输出电压存在一定的纹波,由于控制电路中不包含电流保护,所以这部分电路需要另外设计。虽然这种控制方式有这些缺点,但是还是被改良出来一些变化的控制方式,以避免这些缺点,COT控制及自适应COT控制就是其中典型的类型。
如图9所示,即典型的COT控制示意图。
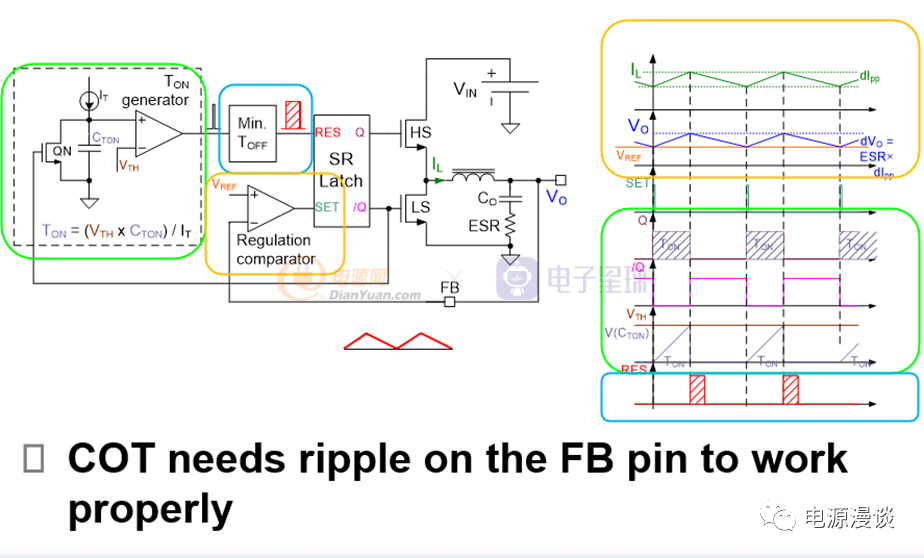
图9 COT控制的一般原理框图
首先,COT控制电路需要一个固定导通时间产生单元,如图9中左侧部分,在右侧的波形图中可知,当输出电压跌落至一个参考电压点时,通过比较器的动作开始一个新的开关周期的固定导通时间,所以这种非线性控制改良了输出比较基准,只需要一个最低电压输出基准即可。
当负载变轻时,允许调整其关断时间以维持高效率。由于可以变频率调整关断时间,因此,负载也响应非常快。
由于其关断时间调整的特性,导通时间固定,因此还是一个变频的控制方式,因此会带来一些问题,如滤波器的设计等。
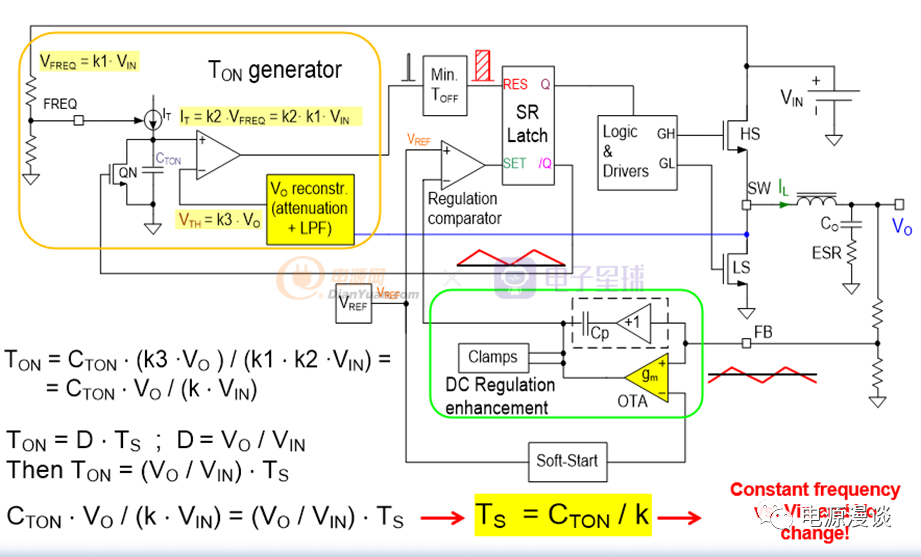
图10 自适应COT控制的原理框图
在COT电路的基础上又进化出来自适应COT架构,这种非线性控制方式的控制核心还是高速比较器,和COT控制的差异是它可以动态地根据输入电压和输出电压去调整导通时间,以维持开关周期的恒定,所以避免了一些应用上COT变频导致的问题。但是在瞬态工作时,其变频的快速响应的优势还是存在的,所以应对负载快速瞬态时,电压过冲或者跌落是很小的。
和恒定导通时间控制相对应的,还有一种恒定关断时间控制模式,由于篇幅所限,我们此处不进行探讨。
总结,上述详细分析了典型的控制模式,如电压模式控制,峰值电流模式控制,平均电流模式控制等,也简要分析了滞环控制及其变化的类型,COT控制及自适应COT控制等。通过分析,可以对开关电源主要的控制模式及其优缺点有一个基本的认识,方便在设计中选择合适的控制模式,扬长避短。