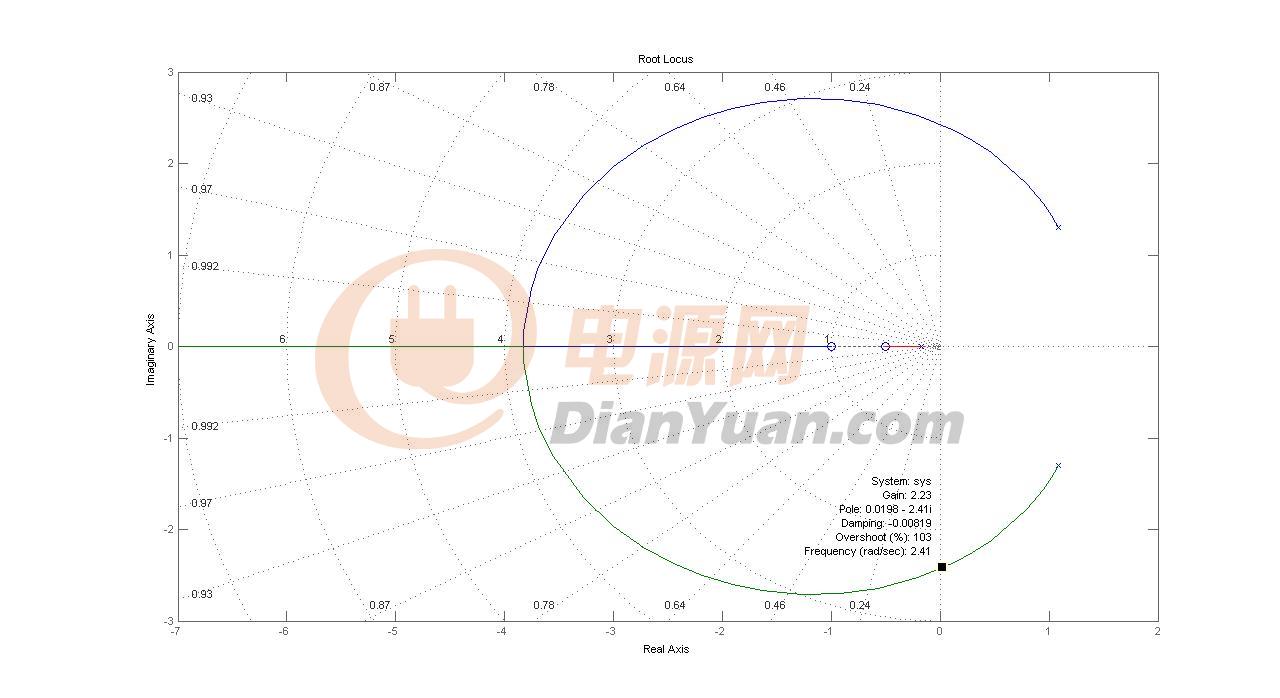
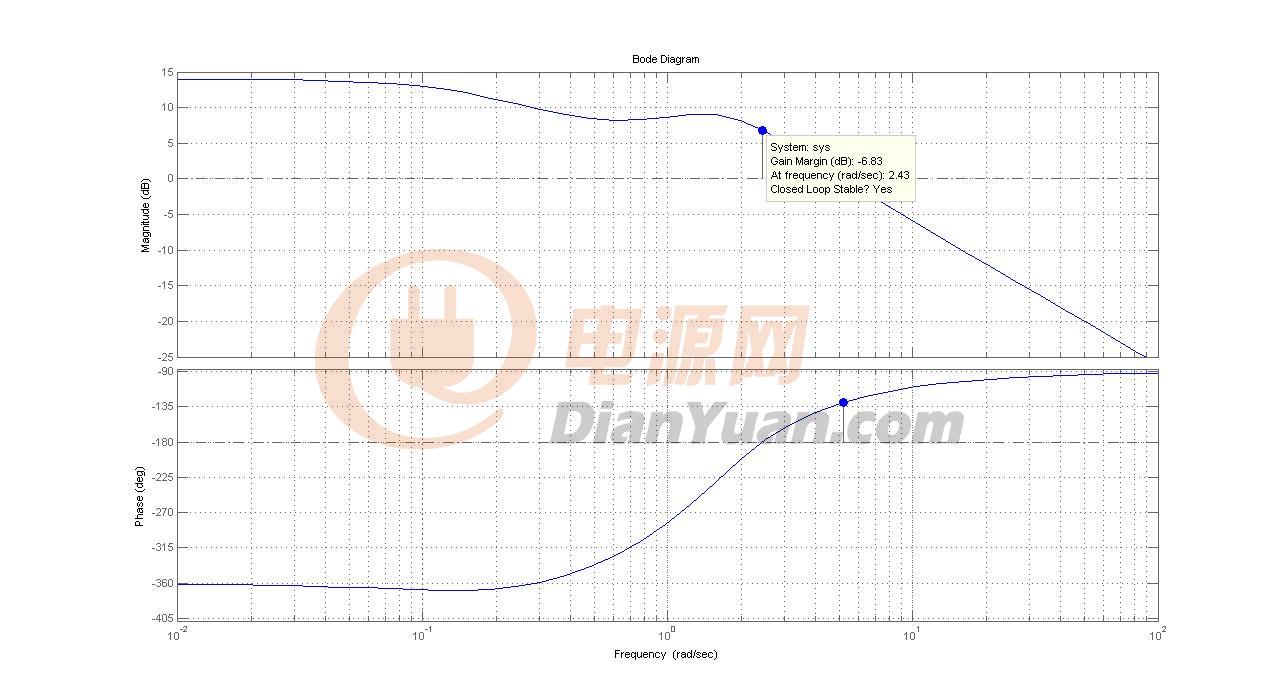
系统稳定性判断
先上图:
全部回复(19)
正序查看
倒序查看
现在还没有回复呢,说说你的想法
@MYLAPLACE
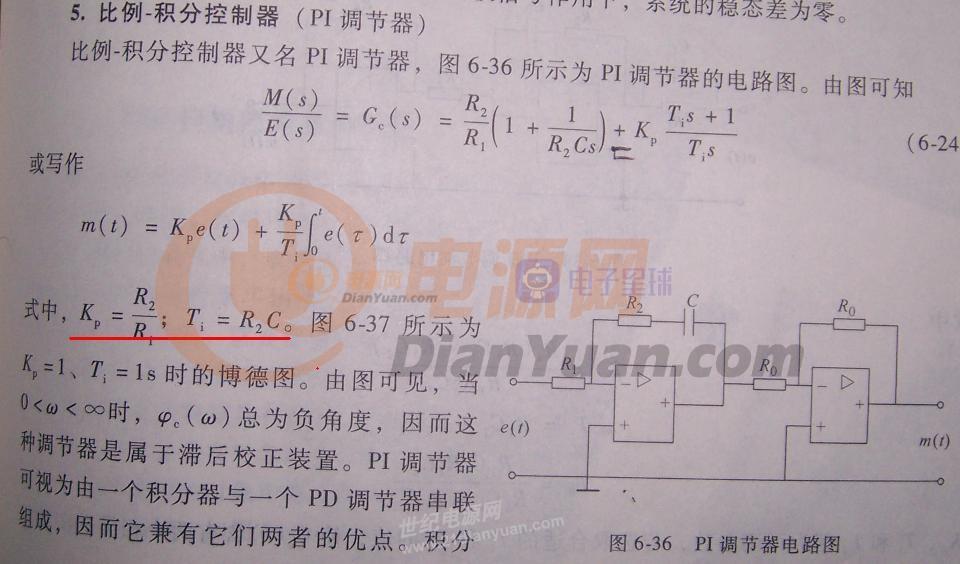
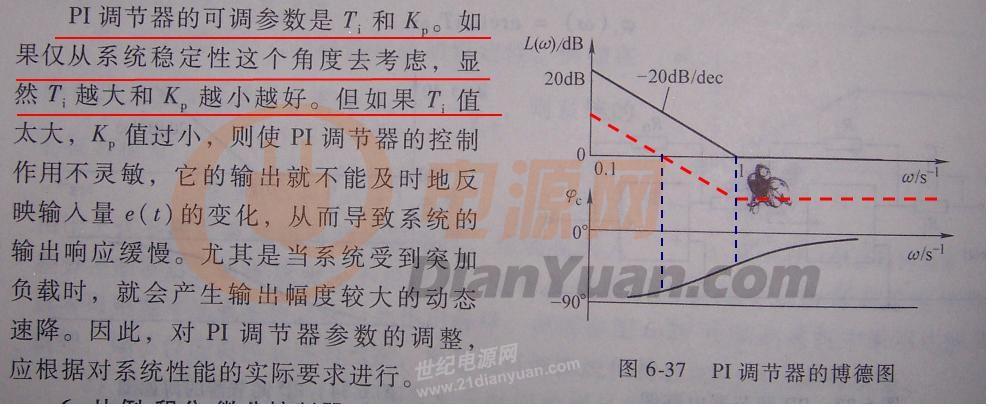
[图片]bode兄,我将书上的话单独截出来了。书上原话说的就是:增益越小,时常越大,系统稳定性就越好。说明:Ti:时间常数 Kp:系统增益
首先,开环增益越低,系统稳定性越好,这句话是有应用前提的,它是针对一个系统的总增益曲线而言的。但我们有时候讨论的时候,是省略了这个前提,很容易造成误解~
对于一个稳定的系统,增益曲线要以-20/dec衰减穿越截止频率,相应的相频曲线,也要以-45度/dec衰减,趋向-180度线。这是一个典型稳定系统的bode图特征。
如果一个系统增益曲线以-20/dec衰减穿越截止频率,而相频曲线是45度/dec递增,那么这个系统的校正环路肯定是不合适的,这样使得高频特性很差。
PI调节器只是作为一个完整系统的一部分,即控制环节,它的这个特点,并不足以否定 开环增益越低,系统稳定性越好 这个观点。
另外,开环增益越低,系统稳定性越好 这个观点,也并不是绝对的。
书上常说的话,应该是这样的:过大的开环增益,可能会使系统振荡,但并不意味着 开环增益越小越稳定。
0
回复
提示
@bode
首先,开环增益越低,系统稳定性越好,这句话是有应用前提的,它是针对一个系统的总增益曲线而言的。但我们有时候讨论的时候,是省略了这个前提,很容易造成误解~对于一个稳定的系统,增益曲线要以-20/dec衰减穿越截止频率,相应的相频曲线,也要以-45度/dec衰减,趋向-180度线。这是一个典型稳定系统的bode图特征。如果一个系统增益曲线以-20/dec衰减穿越截止频率,而相频曲线是45度/dec递增,那么这个系统的校正环路肯定是不合适的,这样使得高频特性很差。PI调节器只是作为一个完整系统的一部分,即控制环节,它的这个特点,并不足以否定 开环增益越低,系统稳定性越好这个观点。另外,开环增益越低,系统稳定性越好这个观点,也并不是绝对的。书上常说的话,应该是这样的:过大的开环增益,可能会使系统振荡,但并不意味着开环增益越小越稳定。
另外,开环增益越低,系统稳定性越好 这个观点,也并不是绝对的。
请bode兄,举个例子说明。
0
回复
提示
@bode
首先,开环增益越低,系统稳定性越好,这句话是有应用前提的,它是针对一个系统的总增益曲线而言的。但我们有时候讨论的时候,是省略了这个前提,很容易造成误解~对于一个稳定的系统,增益曲线要以-20/dec衰减穿越截止频率,相应的相频曲线,也要以-45度/dec衰减,趋向-180度线。这是一个典型稳定系统的bode图特征。如果一个系统增益曲线以-20/dec衰减穿越截止频率,而相频曲线是45度/dec递增,那么这个系统的校正环路肯定是不合适的,这样使得高频特性很差。PI调节器只是作为一个完整系统的一部分,即控制环节,它的这个特点,并不足以否定 开环增益越低,系统稳定性越好这个观点。另外,开环增益越低,系统稳定性越好这个观点,也并不是绝对的。书上常说的话,应该是这样的:过大的开环增益,可能会使系统振荡,但并不意味着开环增益越小越稳定。
学习了!
0
回复
提示

 多谢, 本帖 收藏! 哈哈
多谢, 本帖 收藏! 哈哈