LLC环路较难设计一般动态响应都不太理想,现在出现了电流模式LLC使情况大为改观,这里准备探讨另一种思路既利用查表法实现LLC环路控制。
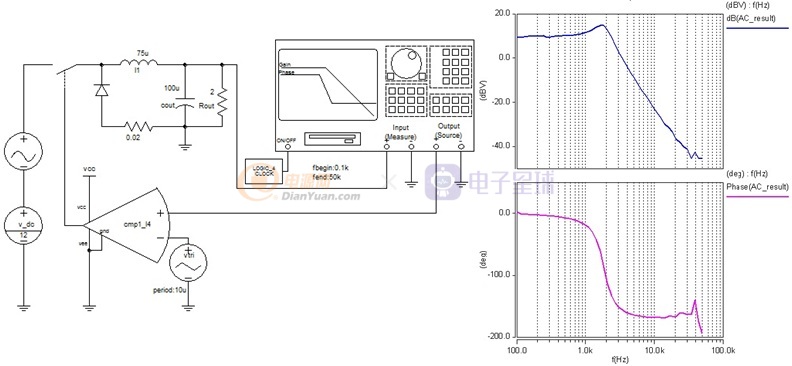
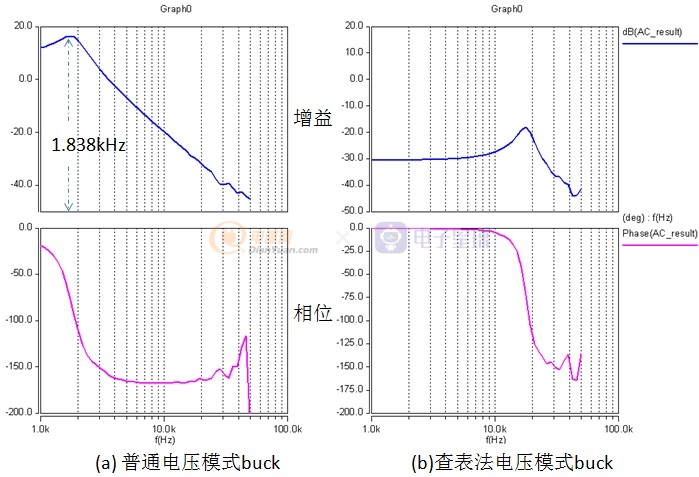
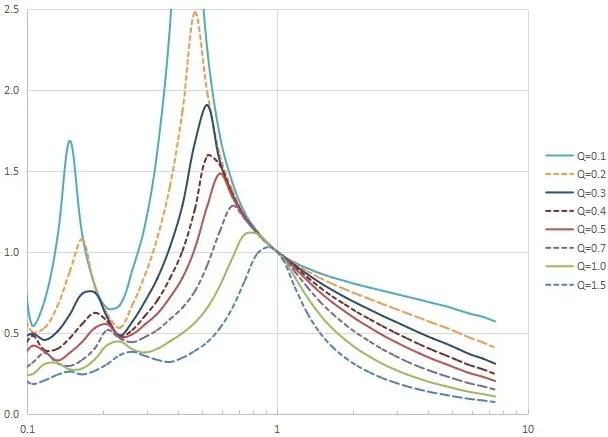
所谓查表法是因为LLC电路的DC增益曲线还没找到准确的方程表达式所以这里将曲线绘制成表并写入控制器中,电路工作时根据不同的工况调用不同的增益曲线表。环路控制个人认为就是对方程的求解过程,通常的PID控制法属于迭代求解(或者理解为逐次逼近)因为没有一个明确的求解方程所以速度慢,当然这也是它的优势不需要明确的求解方程通用性好;查表法的思路就是给出一个明确的求解方程答案瞬时可解,理想中这样可以大幅提升环路特性。 这里准备先用跟LLC电路有些相似的电压模式Buck电路进行验证。