小白第一次写帖子 如有不足尽请指出
本毕业设计也是2015年电子设计大赛的题目
其要求的任务如下:
(1)预置风板控制角度(控制角度在 45°~135°之间设定)。由起点开始启动
装置,控制风板达到预置角度,过渡过程时间不大于 10s,控制角度误
差不大于 5°,在预置角度上的稳定停留时间为 5s,误差不大于 1s。动
作完成后风板平稳停留在终点位置上;
I - 1 / 3(2)在 45°~135°范围内预置两个角度值(Φ1 和 Φ2)。由终点开始启动装置,
在 10s 内控制风板到达第一个预置角度上;然后到达第二个预置角度,
在两个预置角度之间做 3 次摆动,摆动周期不大于 5s,摆动幅角误差不
大于 5°,动作完成后风板平稳停留在起点位置上;
(3)显示风板设置的控制角度。风板从一个状态转变到另一个状态时应有明
显的声光提示。
2.发挥部分
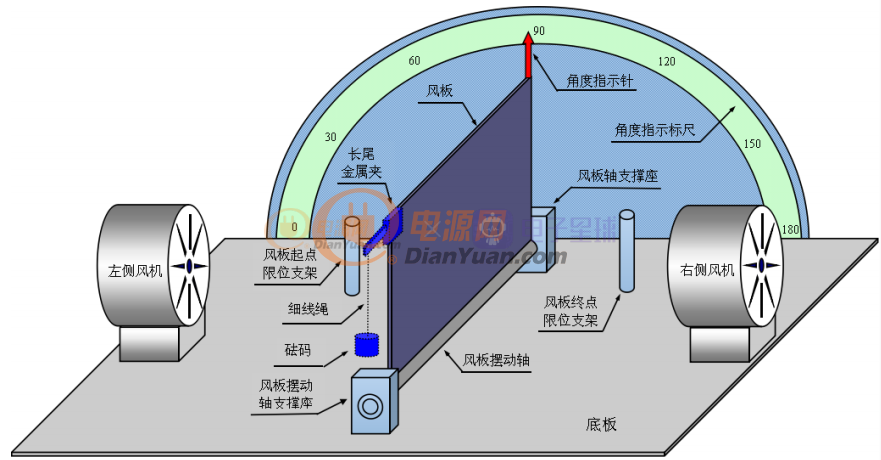
用细线绳将一个重量为 10g 物体(可以用 10g 砝码代替),拴在小长尾金属夹
的尾端上,小长尾金属夹与重物的总长度不小于 50mm,并整体夹在图 1 所示风板
对应位置上。
(1)预置风板控制角度(控制角度在 45°~135°之间设定)。由起点开始启动
装置,控制风板达到预置角度,过渡过程时间不大于 15s,控制角度误
差不大于 5°,在预置角度上的稳定停留时间 5s,误差不大于 1s,最后
控制风板平稳停留在终点位置上;
(2)在 45°~135°范围内预置两个角度值(Φ1和 Φ2)。由终点开始启动装置,
在 15s 内控制风板到达第一个预置角度上;然后到达第二个预置角度,
在两个预置角度之间做 4 次摆动,摆动周期不大于 5s,摆动幅角误差不
大于 5°,动作完成后风板平稳停留在起点位置上;
实物照片:
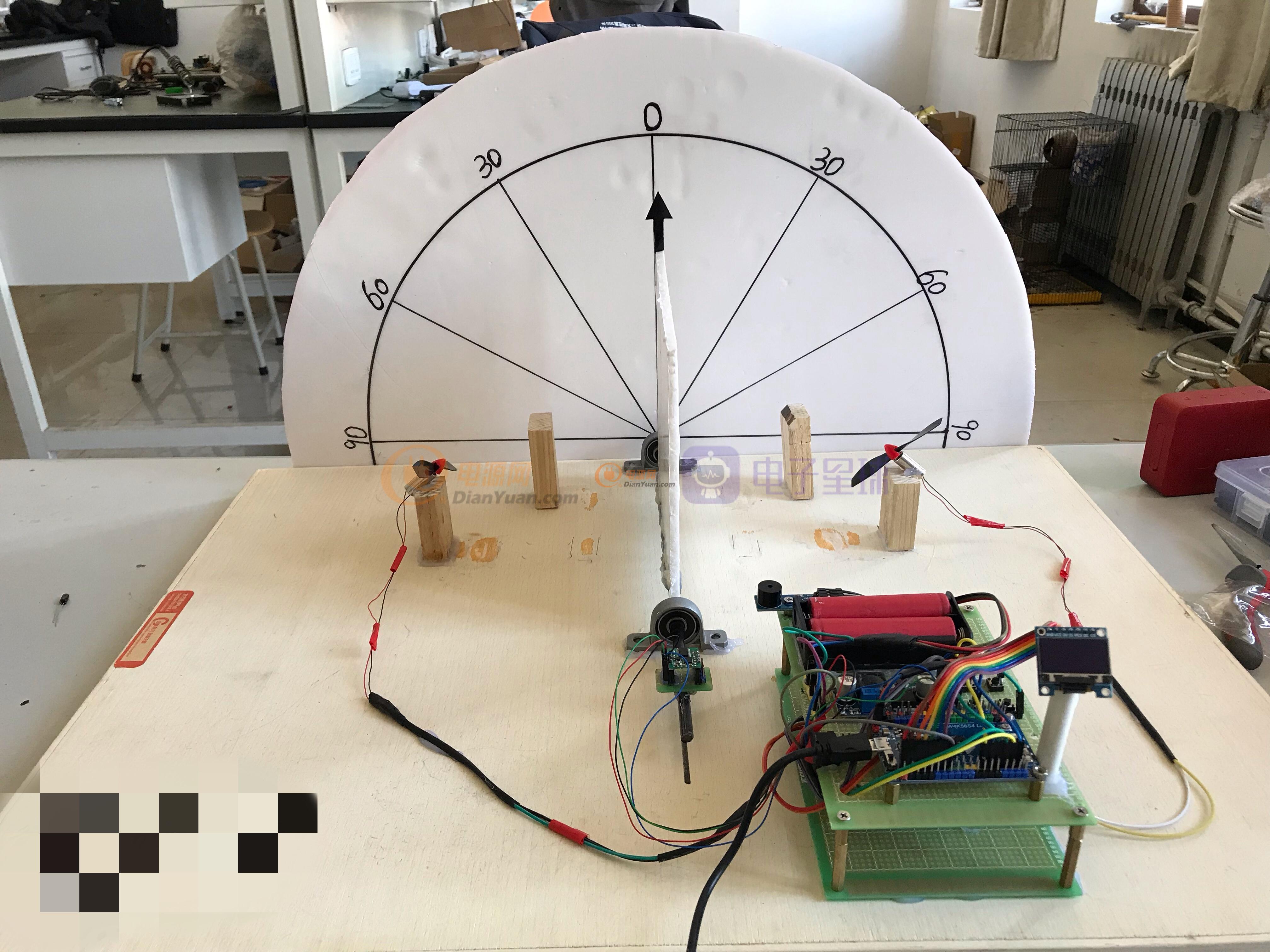
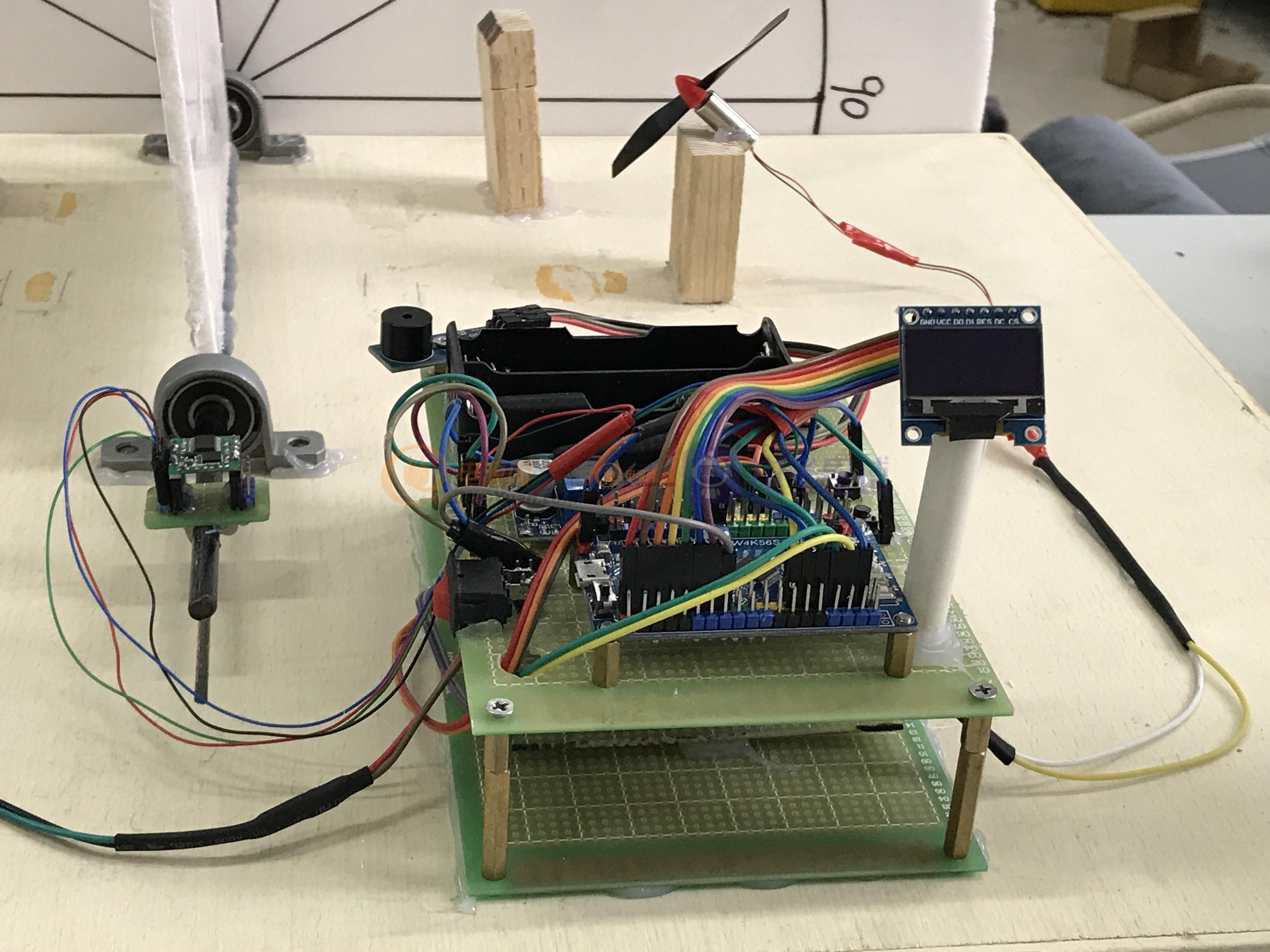
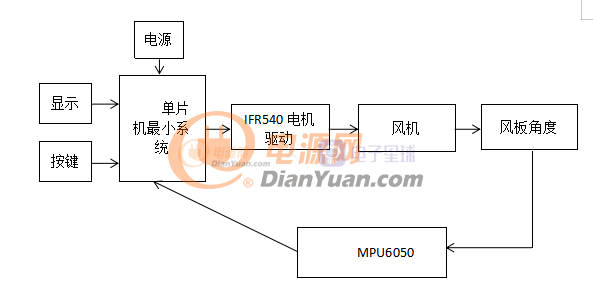
本系统以stc15为主控芯片,MPU6050采集风板倾斜角度,OLED屏幕显示当前角度,设定角度及状态,用IFR540 MOS管驱动820空心杯电机
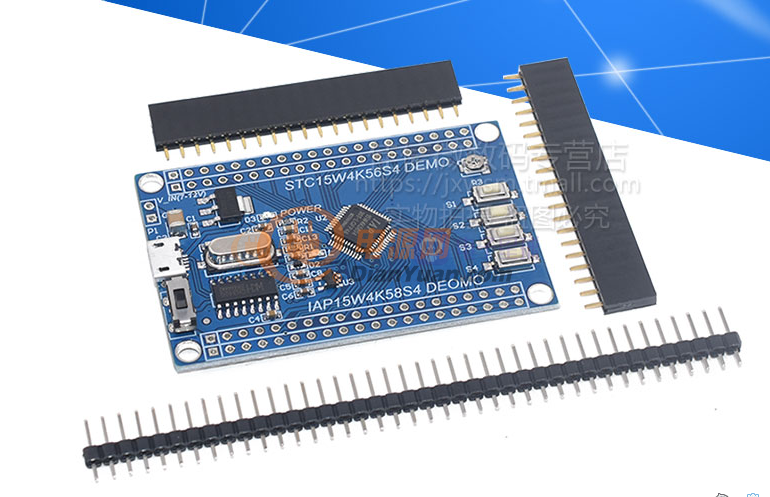
STC15主控芯片:
MPU6050:
角度测量使用了MPU6050 角度传感器,采用高精度的陀螺加速度计MPU6050 不断采集风力摆姿态角数据。MPU6050集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。MPU6050 和所有设备寄存器之间的通信采用400kHz的I2C接口,实现高速通信。且内置的可编程卡尔曼滤波器,采用最优化自回归数据处理算法精确测量风力摆当前姿态角。MPU6050对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量,通过DMP处理器读取测量数据然后通过串口输出。

空心杯电机

MOS管电机驱动
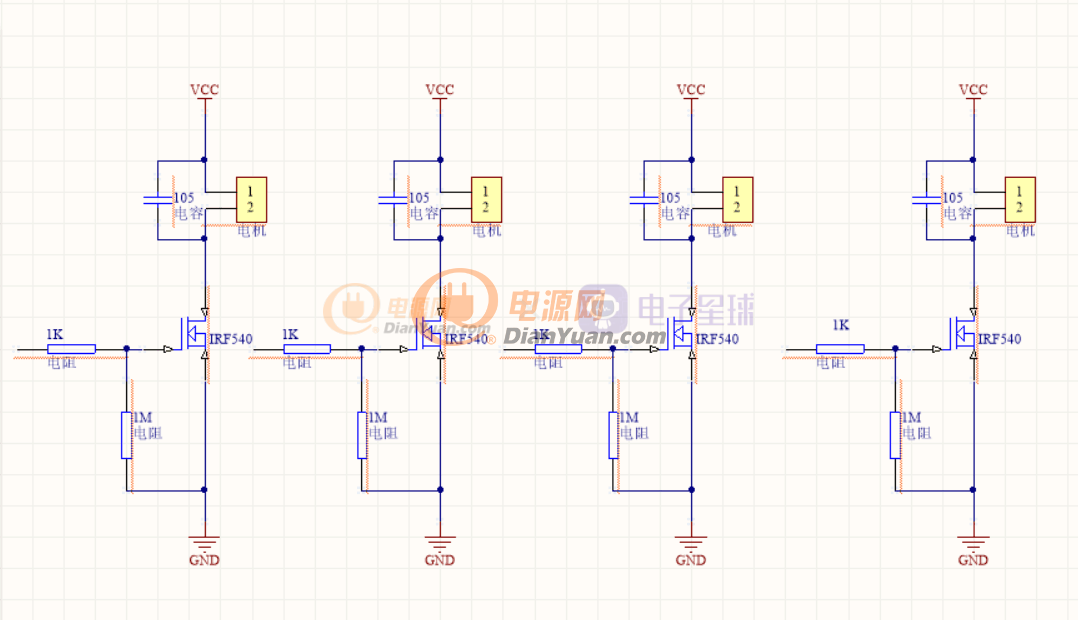
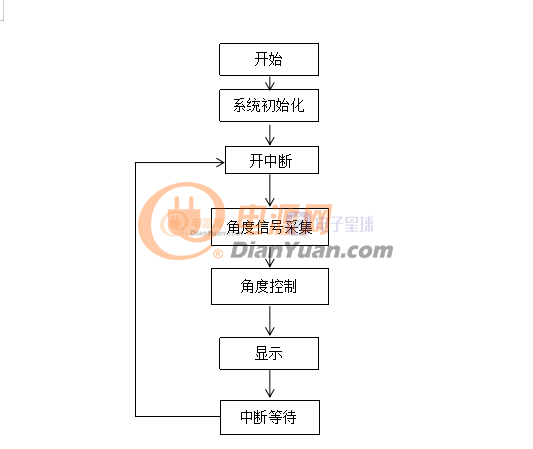
本系统软件设计采用C语言编程,以达到题目要求的控制精度和响应时间。主要完成角度信号的采集、显示并通过采集信号调节PWM占空比来控制电机电压。其中,显示模块负责将角度传感器检测到的角度送到LCD进行显示;角度控制模块负责根据按键的输入信息调节PWM占空比,控制电机转速。