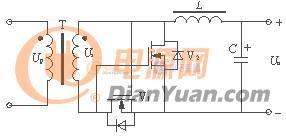
为了提高电源的效率和功率密度尤其是低输出电压的应用场合,同步整流是不可或缺的。
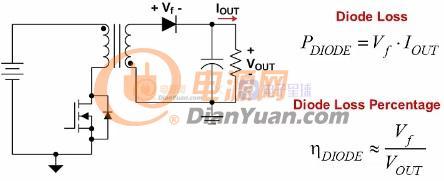
图1-1 反激输出二极管损耗
比如上图的反激电源如果输出二极管Vf=0.7V ,输出电压Vout=3V则效率不会高于3/(3+0.7)=81%。
为了提升效率一般会选用低导通压降的肖特基二极管,相对于肖特基二级管采用同步整流可以进一步提升效率。

图1-2 普通二极管、肖特基二极管及同步整流的对比
为了提高电源的效率和功率密度尤其是低输出电压的应用场合,同步整流是不可或缺的。
图1-1 反激输出二极管损耗
比如上图的反激电源如果输出二极管Vf=0.7V ,输出电压Vout=3V则效率不会高于3/(3+0.7)=81%。
为了提升效率一般会选用低导通压降的肖特基二极管,相对于肖特基二级管采用同步整流可以进一步提升效率。
图1-2 普通二极管、肖特基二极管及同步整流的对比
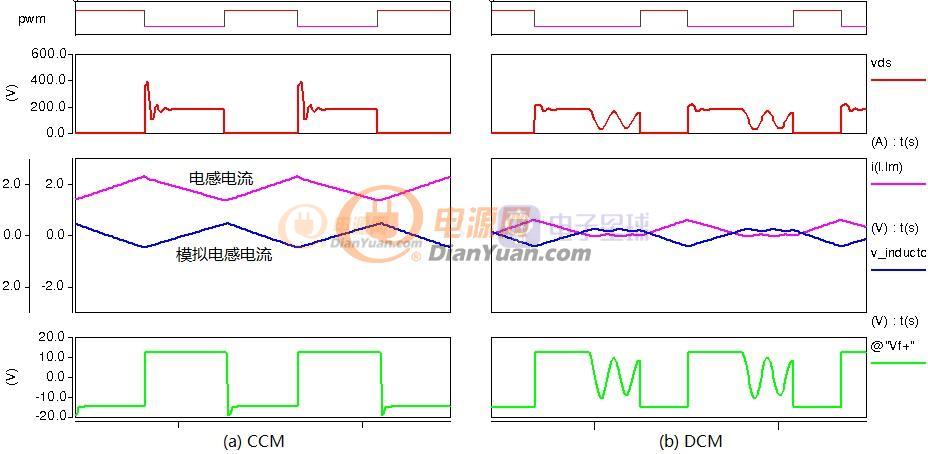
先以隔离反激同步整流为讨论目标,反激的储能电感就是变压器本身其波形特性如下:
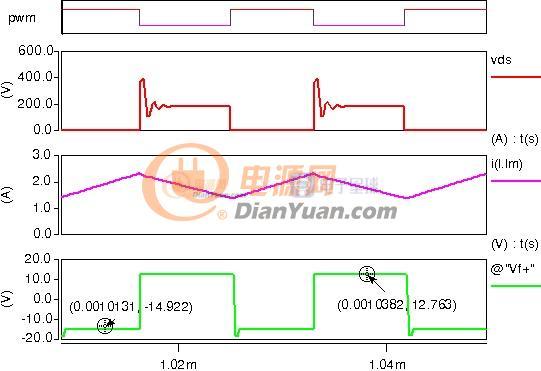
图1-3 反激输出二极管Vf+端波形
仿真参数:变压器匝比n=6.5:1,输入电压100V 、输出电压12V、二极管导通压降0.7V、开关频率60kHz。
上述波形中的Vf+是图1中输出二极管的阳极波形,在Ton时刻受输出电压钳位Vf+=12+0.7=12.7V ,在Toff时刻输入电压通过变压器折算到次边Vf+=-100/6.5=-15.38V (因漏感的分压作用实际仿真值为-14.92V)。这个Vf+近似的反映了电感两端的电压变化情况,因而可以用此电压来构建和模拟伏秒平衡时的电流状态,从而实现对电流的预判断。
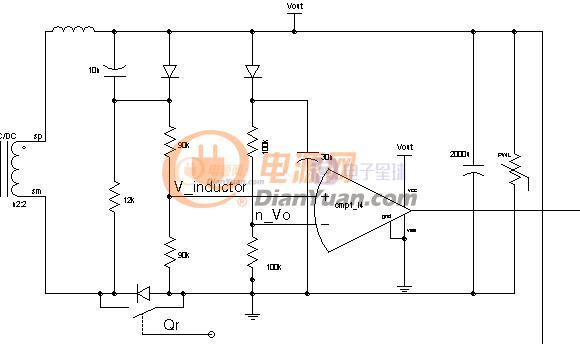
模拟电感电流可以用一个积分电路来实现,积分电路还可以平滑掉高频震荡波提高电路的抗干扰能力,这里采用简单的RC电路来实现积分功能。
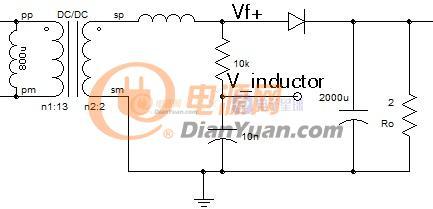
图1-4 用RC积分电路实现电感电流模拟
图1-5中的模拟电感电流是一种镜像的交流信号处理起来有些麻烦,所以把积分电路变换成另一种形式。
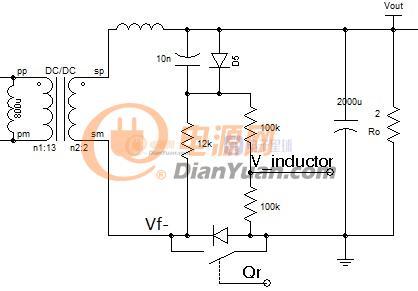
图1-6 RC积分电路 2
同步整流是对开关管进行操作时间为nS级的所以控制电路中没有采用运算放大器都只是高速比较器,镜像操作如上图将积分电阻、电容互换位置即可。不过这种操作后参考点变成了Vout,通过二极管D5钳位。
另外初步将同步整流管放置在低边,这样驱动会简单些不过EMI共模噪音会差些。
稳态时同步整流驱动信号Qr的产生可分下面两部分:
一、 延迟开启
图1-6中的输出二极管阴极Vf-端的信号和初级MOS驱动信号Q近似同步
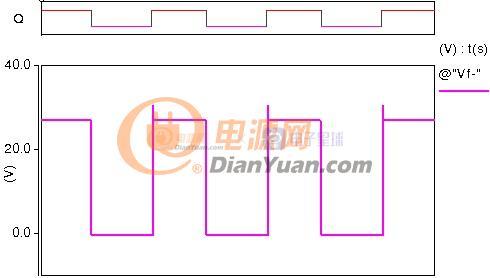
图1-7 输出二极管阴极Vf-信号
以Vf-信号为参考增加一小段延迟(死区时间)就可以得到延迟开启的Qr信号。
二、 提前关闭
通过比较模拟的电感电流信号V_inductor和输出Vout信号来实现提前关闭同步信号的功能。
综合一、二两点得出稳态CCM模式时的同步驱动Qr信号如下:
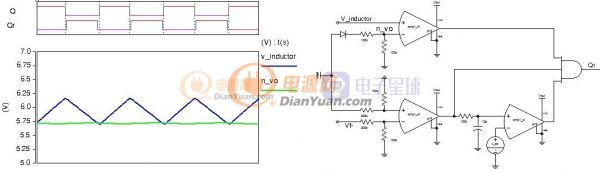
图1-8 稳态CCM模式Qr信号及产生电路
断续模式时电感电流波形会有些震荡,调整一下上述电路的电阻参数即可解决。
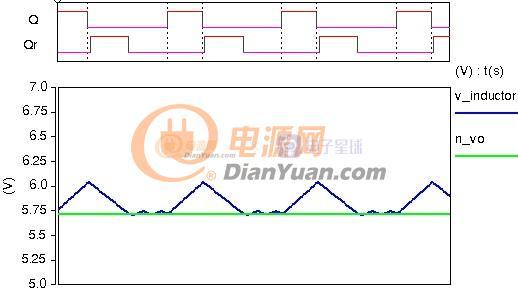
图1-9 稳态DCM模式Qr信号
动态时伏秒“不平衡“,针对这种基于伏秒平衡的控制方法要如何改进呢?
反激的伏秒平衡公式为Uin*Ton/Lm =Uo*Toff/Lm简化后Uin*Don =Uo*Doff,最后推出Uo=Uin*Don/(1-Don)(在BCM或CCM模式下)。
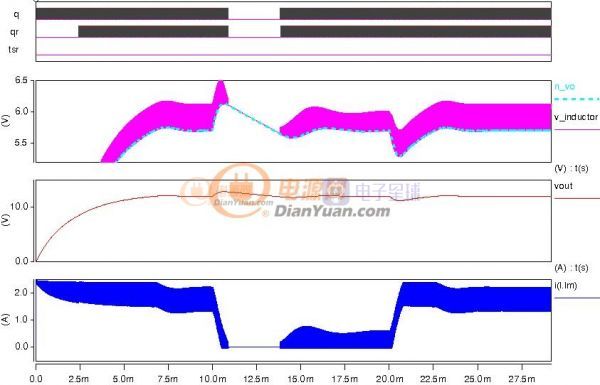
在电源刚上电时,输出电压Uo从零开始逐渐上升至设定电压值,这个过程中若要维持伏秒平衡则Toff的时间将远大于开关周期,对于定频控制模式这是无法实现的所以在此阶段伏秒无法满足平衡。
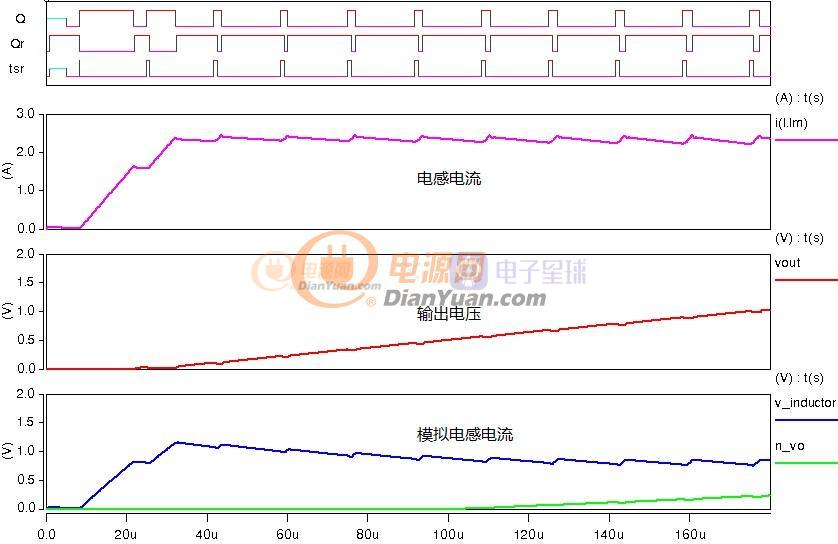
图2-1 上电伏秒不平衡波形
上图中由于伏秒不平衡电感电流要比稳态时的高(电路有做限流处理),模拟电感电流也超出了n_vo信号的范围,同步信号Qr失控。图中的tsr信号表Q同Qr信号相与的操作,用来检验原边及同步信号是否同时导通,正常情况tsr信号应恒为低电平。
要实现任意情况下都“满足”伏秒平衡成立,根据伏秒平衡公式有两种方法:
方法1、在开关周期上做文章
这种方法是强制令信号Q+Qr<=T(Q、Qr这里分别为原边及同步MOS的导通时间,T为开关周期),这样即使输出电压Uo=0也可以推算出同步整流信号Qr的最大导通时间以避免出现同时导通的情况。
具体实施方法是由Q信号(实为Vf-信号)触发周期≤T的计时器电路作为次边同步MOS的关断信号,这种方法只针对临界和连续模式在断续模式下不受影响。另外增加了欠压保护功能,仿真效果如下:
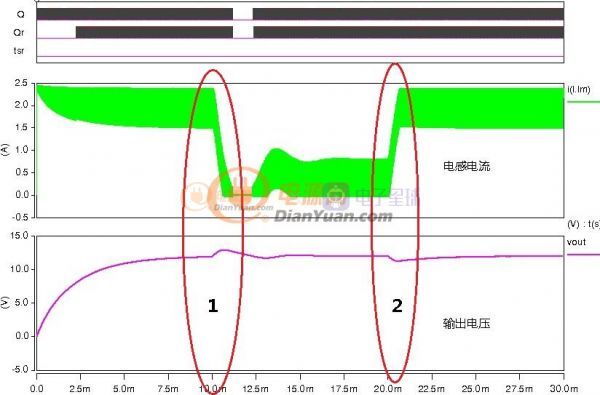
图2-2-1 周期法启动及动态波形
按照周期法做的仿真在启动、满载到轻载、轻载到满载过程中都没由出现同时导通的情况(tsr信号恒为低电平)。
对图中圈1和圈2做局部放大如下:
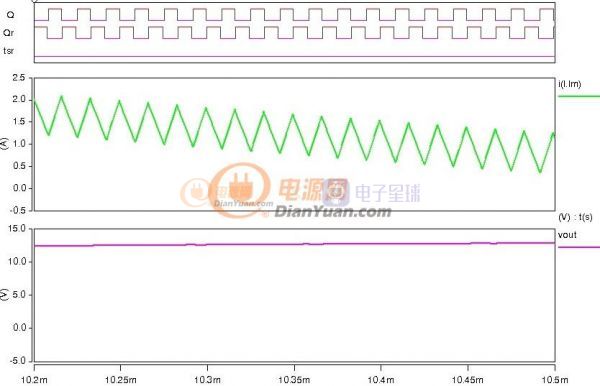
图2-2-2 周期法满载到轻载突变局部放大图
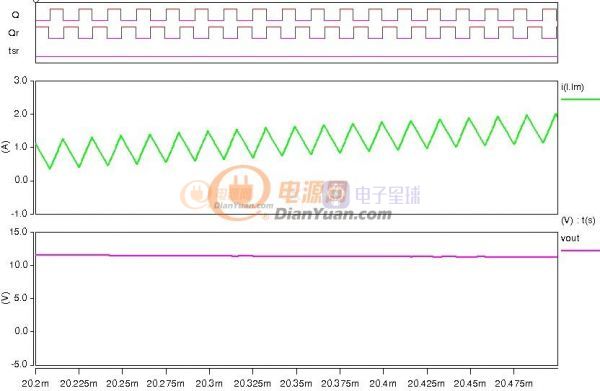
图2-2-3 周期法轻载到满载突变局部放大图
从仿真结果看,周期法是可以解决连续模式、大动态负载下的同步整流控制问题。但周期法也有局限性需要根据主开关的工作频率来精确设置同步整流管的工作频率,在变频模式中无法使用或是性能达不到最佳。
在对这种Vout法做极限测试时发现了几个问题,其中之一就是这种Vout法存在次谐波震荡的隐患。
当初级侧电流采样电阻取R=0.3时电路工作正常,波形如下:
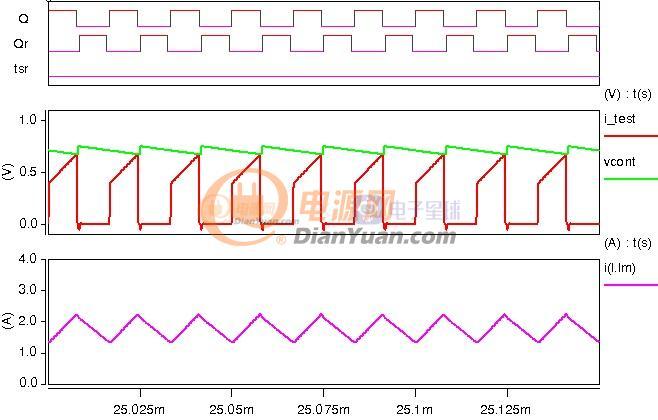
图3-1 R=0.3正常波形
当取采样电阻取R=0.1时发生了次谐波震荡,
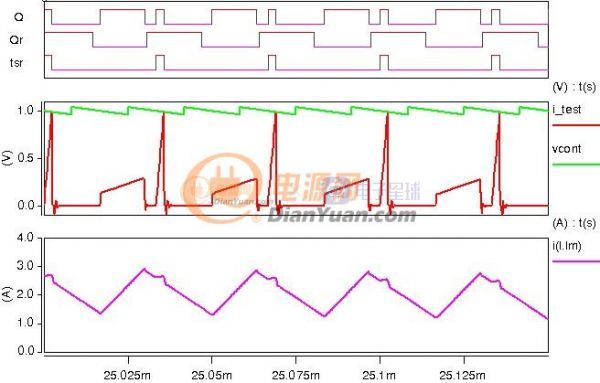
图3-2 R=0.1次谐波震荡波形
这里的次谐波震荡与电流模式(CCM、Don>0.5)反激略有不同,在前一个周期输入向输出传输能量,后一个周期输出向输入传输能量(电流斜率由次级漏感决定),其它方面比较相似。发生次谐波震荡时输出电压低于设定的12V。
消除次谐波震荡可以加斜坡补偿或者令占空比Don<0.5,图3-2是有加斜坡补偿的只是补尝的太少。图3-1中最大占空比上限为Donmax=0.8,但是并没有发生次谐波震荡,那么次谐波震荡的临界条件是什么呢?