我们对于电机选择在于以下
方案一:采用无刷电机。它的特点是高效率、低能耗、低噪音、超长寿命、无级变频调速、相对低成本且简单易用,扭矩大。无刷电机以电子换向取代机械换向,无机械摩擦,无电火花,采用外转子结构,扭矩较大,配合电调方便控制,升力大。
方案二:采用有刷电机。有刷电机响应速度快,起动扭矩大,直流有刷电机运行平稳,起、制动效果好,直流有刷电机控制精度高,扭矩小。
综合无刷的噪声小,使用方便的特点,我们选取了无刷电机,
以下是我们针对赛题的要求做出的商讨:
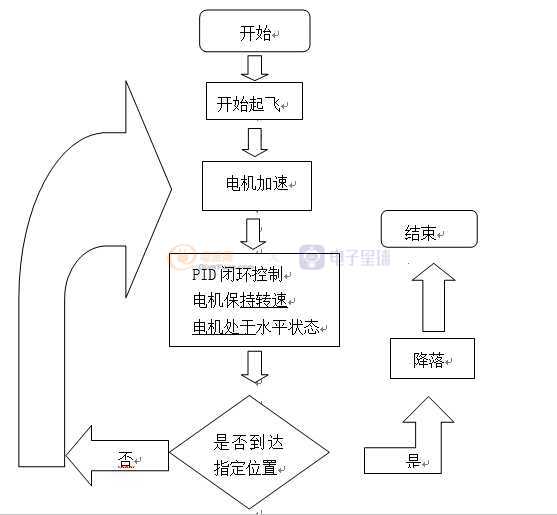
1)电机启动时加速要大,正反转切换时间短,控制灵活,同时需要有较好的控制算法。
2)姿势检测的传感器响应要快,稳定性要高,可以实时采集飞机的高度。
我们的算法主要是PID,
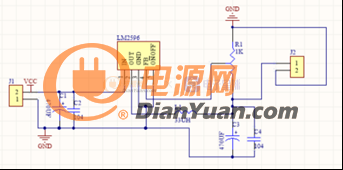
得到飞行高度数据后可通过PID算法来控制。通过内部PID循环计算出所需的旋转角速度并且和原始陀螺仪数据比较,将差异反馈给PID控制器,并发送到电机来修正高度。其中我们的稳压模块使用的是lm2596,使用方便,效用高,我们将电池并到16v,经过稳压模块到5v。给电机使用。