电动自行车作为一种环保的交通工具已得到了广泛使用。直流无刷电机及控制器是电动自行车中的关键部件,其性能决定了整个系统的电能转换效率。控制器根据霍尔传感器输出信号,驱动3相全桥电路,实现对直流无刷电机的控制,因此霍尔信号的准确性及换相的实时性会直接影响电机的性能。在现有电动自行车控制器方案中,霍尔传感器信号的采集均采用软件扫描形式进行,换相操作也通过软件处理,换相误差大,实时性差,尤其对中高速电机更为明显。而英飞凌公司的XC866/846可以支持硬件霍尔信号采集、换相操作,且无需额外电路即可实现同步整流控制,单片机利用率高,电机控制性能好。
直流无刷电机控制
传统的直流无刷电机采用梯形波驱动方式,系统结构框图如图1a所示,MCU根据三个霍尔传感器信号调制PWM输出,PWM驱动波形如图1b所示。由于在这种控制方式下,电机端电压波形为梯形波,因此也称为梯形波控制。从图1中可以看出,PWM输出存在6种状态,对于每种状态,逆变桥的6个功率管中仅有2个工作,例如,当状态等于5时,CC60和COUT62对应通道开通。

图1:直流无刷电机控制拓扑结构及PWM驱动信号波形。
在PWM开通和关断期间,逆变桥内的电流如图2所示(以状态5为例)。当PWM开通时,电流经过M1,经过电机及M6返回电源。当PWM关闭时,续流电流经由D2(M2中的寄生二极管)、电机相线和M6返回电源。由于二极管D2的导通压降为0.6~1V左右,因此续流电流在这个二极管上会产生较大的损耗,当电机负载大、续流电流大的时候,损耗问题更加严重,将影响逆变器效率。

图2:简单梯形波控制中的电流示意图。
为减少续流电流在寄生二极管上产生的损耗,在一些应用中使用MOSFET作为逆变元件。由于MOFSET具有导通阻抗低、电流可以双向流动的特点,在M1关断,进入续流阶段时,开通M2,使续流电流流经M2,由于MOSFET的导通阻抗极低,损耗很小,例如当续流电流为10A,MOSFET导通电阻10mΩ,二极管D2压降0.7v时,若续流电流流经D2时产生损耗为7W,而流经MOSFET时产生损耗仅为1W,因此使用这种控制方式可以减少损耗,提高逆变器的效率,在续流电流大的情况下效果更加明显。这种控制方式亦称为同步整流,电流示意图如图3a。由于MOSFET的上、下管需要交替开通,为避免直通的危险,需要添加死区时间。采用同步整流控制时,6路PWM的驱动波形如图3b所示。

图3:同步整流控制中的PWM驱动及电流示意图。
CCU6E霍尔传感器模式
捕获/比较单元6(CCU6E)是英飞凌的8/16位单片机中包含的专用电机驱动单元,内部结构如图4所示。CCU6E包含两个专用16位定时器(T12,T13),可以产生各种PWM调制信号,支持交流电机、直流无刷电机、开关磁阻电机等多种电机控制,结构框图如图4所示。CCU6E还提供支持块交换和多相电机控制的多通道模式,并集成专用霍尔传感器模式,可在使用极少CPU资源的前提下实现直流无刷电机的控制。

图4:CCU6E结构框图。
霍尔传感器模式如图6所示。在霍尔传感器模式中,CCU6E通过专用输入接口CCPOS0、1、2自动采样霍尔信号,为滤除霍尔信号中的干扰,CCU6E利用死区时间计数器DTC0实现滤波功能,任何霍尔信号的跳变将自动重载DTC0并开始向下计数,当DTC0计数到1时,进行霍尔信号的采集操作。从而在霍尔信号变化到采样点之间产生了一个延时,减少干扰对换相的影响。

图5:寄存器MCMOUTL定义。
当滤波延时完成后,CCU6E会自动进行霍尔信号的采样和比较操作,如果霍尔输入值等于期望值(MCMOUTH中EXPH),则表明发生正确的霍尔换相事件(CHE),可触发正确霍尔换相中断。如果输入霍尔信号既不等于期望值,也不等于当前霍尔值,则表明霍尔信号发生错误(如霍尔信号线断开),同时可触发错误霍尔事件中断,通知CPU进行相应处理。
霍尔传感器模式在同步整流中的应用
在同步整流控制中,需要互补输出的PWM,但T13无法满足要求,因此需要使用T12生成互补PWM,DTC0~2用于死区时间生成。由于霍尔传感器模式中使用DTC0进行霍尔滤波操作,因此在同步整流中无法使用。此时利用CCU6E中T13可与其它外部事件进行同步的特性替代DTC0,完成硬件霍尔滤波。系统框图如7所示,任何霍尔信号的跳变可自动触发T13定时操作(T13TEC = 0x07),通过设定T13周期值即可实现滤波时间的设定,当T13计数到周期设定值时,自动触发霍尔信号的采样及比较操作(HSYNC = 0x02)。PWM由T12与3个通道设定值比较产生,同时添加死区时间,当正确霍尔事件发生时,PWM信号与MCMPx耦合,输出到对应的PWM端口。
实验结果
本文针对上述控制方法,在英飞凌低压驱动套件上进行实现,驱动24V直流无刷电机BL3056,PWM频率15K,霍尔信号通过*OS0 - 2输入,霍尔输入滤波时间10us,实现同步整流控制。电机端线对地电压如图8所示。每相逆变桥的上、下管交替导通,死区时间为2us。

图6:同步整流控制中电机端线及逆变桥驱动电压。
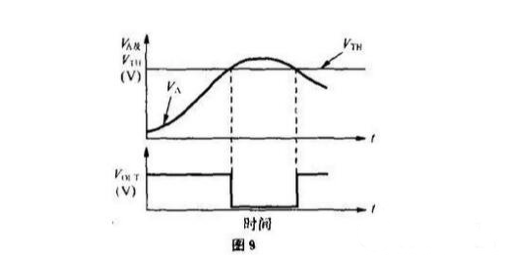
图7为同步整流控制下,霍尔信号输入及换相之间的波形图,其中紫、黄、绿色波形为霍尔输入信号,D0~D5为六路PWM输出信号,由图可以看出霍尔信号跳变至输出PWM换相之间的间隔为10us,正好为T13的滤波时间。

图7:利用霍尔传感器模式时的换相波形。
本文小结
本文阐述了利用英飞凌XC866/846中包含的CCU6E模块实现硬件霍尔换相和同步整流的方案,并进行了验证。与传统的利用软件扫描霍尔输入的方案相比,CCU6E可以自动进行霍尔信号滤波、采样、比较及换相等操作,CPU占用率低,占有软件资源少,换相误差小,电机控制效率高,对于高速电机等对换相误差要求高的应用,具有很大优势。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 研发工程师的工具箱 |
 |
| 智慧生活 创新未来 |



| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006