摘要:根据蓄电池分级恒流充电的要求,给出一种基于DSP、变参数积分分离PI 控制的新型蓄电池恒流充电电源的设计方案。介绍了电源的系统结构、工作原理、控制策略及软件设计。目前该电源已投入工程使用。
1 引 言
蓄电池正常充电时,比较好的充电方法是分级定流方式,即在充电初期用较大的恒定电流,充到一定时间或蓄电池达到一定电压后,改用较小的恒定电流充电。同时蓄电池恒流充电电源不同于普通的直流电源,它的工作负载范围非常宽,其输出电压可能从近似为零变到额定值。因此,在较宽的负载范围内保证蓄电池充电阶段的平滑过渡,以及不同阶段时的恒流特性是蓄电池恒流充电电源的设计难点。这里设计的基于DSP变参数积分分离PI 调节的两级恒流充电电源可方便地解决这一难题。
2 系统结构及工作原理
图1 示出蓄电池恒流充电电源的结构框图。该电源可对蓄电池进行两级恒流充电,两阶段的充电终止条件可分为充电时间原则、充电电压原则或时间/ 电压混合原则,并可自动完成两阶段电流转换、充电原则转换和相应充电参数值的调整。
装置主电路的工作原理是首先对380V 输入交流市电进行EMI滤波,采用带十二相自耦变压器的不控整流电路将交流电变换为直流电,从而有效地减少了输入级AC/DC变换产生的谐波含量,提高了功率因数,降低了输入变压器的容量。利用全桥高频逆变电路将直流电逆变为高频双极性PWM波,经高频脉冲变压器降压,双半波整流和输出滤波后,最终输出恒定的直流电流对蓄电池负载充电。
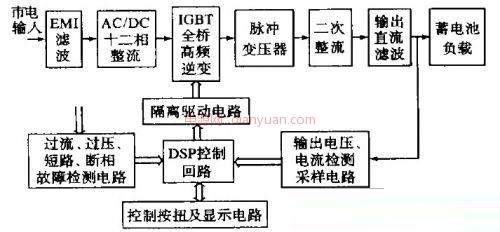
图1 恒流充电装置结构框图
控制系统由DSP及其外围电路组成,主要完成对输出电压、电流信号的检测、采样和计算;对外部控制指令的接收和处理;对恒流充电的控制;对驱动信号的产生;对显示数据的发送及整机的控制等功能。DSP控制芯片采用美国TI 公司生产的数字信号处理器TMS320F240 ,其具有丰富的片内集成外设,大大减少了DSP的外围元器件。此外,因其高速信号处理和数字控制功能使它特别适用于需要进行复杂算法的控制系统。
3 控制策略
PI 控制器以其结构简单、控制稳态精度高等特点,广泛应用于控制领域。传统数字PI 调节器的数学模型为:

其增量表达式为:

式中 e ( k) , e ( k - 1) ---充电电流第k和k - 1次采样误差值
Kp ---比例系数
KI ---积分系数
传统PI 调节的Kp和KI在控制过程中为常数,而文中装置需要对蓄电池进行分级恒流充电,两级的充电参数值不相同且负载范围较宽,因此为了达到较好的控制效果,需根据实际情况对控制参数进行相应的调整。在不同的输入量区域内,选取PI参数的要求不同,其取值规则为:
①Kp 值大,系统响应快,调节精度高;但Kp 值过大时,则易造成系统超调大,甚至不稳定。因此,在误差e ( k) 趋于增大时需要适当减小Kp 值,以防止超调;当误差e ( k) 趋于减小时,要增大Kp 值,以提高系统响应速度。
②KI 的作用主要是消除稳态误差,以提高系统的调节精度。KI 值大,误差消除能力强,但在起动过程中易出现积分饱和及调节超调量增加的现象。
为此,要求KI 在误差大时为零,以消除积分饱和现象;进入稳态区域时,加入积分调节。这样既保证稳态时对积分的要求,又避免了积分饱和现象。
根据上述变参数PI 的控制规则,该系统采取变参数与积分分离相结合的PI 算法调节逆变桥的驱动脉宽。图2 示出控制原理图。其中, I G 和I F 分别为给定充电电流值和实际充电电流反馈值。其控制思想是按照充电电流误差e ( k) 的正、负及上升、下降趋势,将反馈电流一个周期的波动分为4 个区间,即区间1 (0~ t1) ,区间2 ( t1~ t2) ,区间3 ( t 2~t3) ,区间4 ( t3~ t4 ) .在不同的区间调用不同的PI参数,从而实现最佳PI 调节。在此基础上又引进积分分离PI 控制算法,既保持了积分作用,又减小了超调量,使得控制性能有较大的改善。
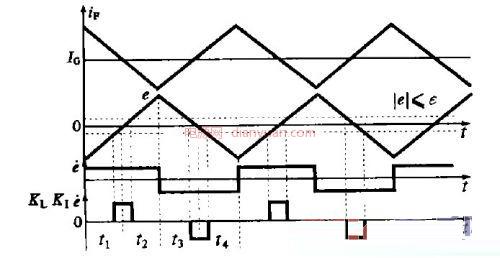
图2 PI 调节原理图
其具体实现如下: ①根据系统实际情况,人为设定一阈值ε> 0 .
②当│e ( k) │>ε时,即偏差值e ( k) 比较大时,去掉积分环节,既可避免过大的超调,又可使系统有较快的响应。
③当│e ( k) │≤ε时,即偏差值e ( k) 进入稳态区域时,加入积分环节,可保证系统的控制精度。
④在区间1 和区间3 中,系统输出在调节器的作用下向给定值I G 接近。为了减小系统稳态误差,提高控制精度,采用大比例调节系数KP1使反馈电流i F 迅速接近IG。但KP1的增大会使系统的相对稳定性降低,甚至造成系统不稳定,所以在区间2和区间4 采用小比例调节系数KP2 ,以降低电流反馈值偏离给定值的速度。
通过上述理论分析,推出控制量Δu ( k) 的数学表达式为:
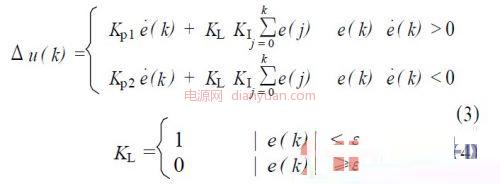
式中 ε---积分门限。 e( k) ---误差的变化量, e·( k) = e ( k) - e ( k - 1)。
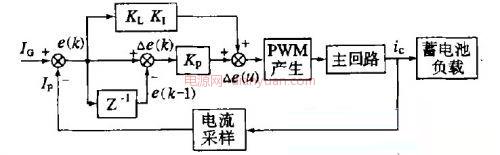
图3 控制系统原理方框图
图3 示出控制系统原理方框图。与DSP 的T1PINT 周期同步的电流A/ D 采样,将测得的电流平均值作为反馈值I F参予电流调节器的运算。经过变参数的积分分离PI 计算,调节驱动高频逆变电路中开关管的驱动信号,从而调节充电电流保持恒定。
4 软件设计
图4 示出实现变参数积分分离PI 算法的软件流程图。
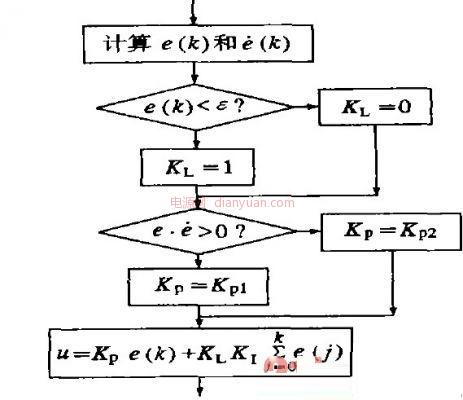
图4 PI 调节软件流程图
为了增加整个充电系统的工作安全性,确保程序运行的准确可靠, 还利用DSP内部的看门狗(WD) 和实时中断(RTI) 模块监视软件和硬件操作,并提供可编程间隔的中断,如果软件进入一个不确定的循环或者CPU出现暂时性异常时,WD 计数器溢出,以产生一个系统复位,从而避免造成严重的程序运行错误。
5 试验结果及结论
该充电电源的输出电压范围为0~42V ,两级充电电流均为2~36 A 可调,充电电流精度小于5 %.可对12 V 或24 V 等级的碱性或酸性蓄电池进行恒流循环和补充充电,也可对新蓄电池进行恒流充电。
图5 示出不同充电电压时的充电电流波形。由图可见,在不同充电电流给定下均取得了良好的实际充电电流波形,并且当蓄电池电压变化时,因在线的变参数PI 调节,充电电流保持恒定,因此系统具有良好的动态性能和恒流特性。目前该充电电源己在多艘大型船舶中使用。
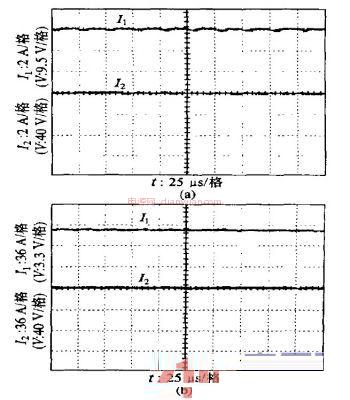
图5 充电电流波形( I为充电电流值, V为蓄电池两端电压值)
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 研发工程师的工具箱 |
 |
| 智慧生活 创新未来 |



| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006