随着现代汽车技术的发展,汽车的电子化、智能化、网络化提高了汽车的舒适性,但同时对于汽车的安全性提出了新要求。电动车窗通过电机来驱动车窗玻璃自动升降,许多电动车窗不具备检测障碍物自行防夹,对乘客存在了一定的安全隐患,特别是年龄较小的儿童乘客。美国交通部颁布了FMVSS118,并严格规定轿车和小型货车强制执行该法规。虽然国内还没有相关法律的规定,但在不影响舒适性的前提下,设计一款防夹系统是汽车行业发展的趋势。
LIN(Local Interconnect Network)总线全称为区域互连网络,是一种结构简单、配置灵活、成本低廉的新型低速串行总线。文中设计了一种基于LIN总线电动车窗防夹系统,通过LIN总线可将车窗状态、控制参数传输至主控终端进行显示,并组建车窗防夹网络,可以拓展到车身的其他部分。车窗玻璃的实时位置通过霍尔传感进行检测,根据驱动电机的电枢电流变化进行障碍物判断,将其结合以实现防夹功能。选取Freescale公司的MM912F634为车窗控制器,电机驱动采用继电器。该方案生产工艺简单、兼容性好、成本低、抗外界干扰能力强,解决了安全隐患,提高了汽车的安全性能。
1 电动车窗防夹系统方案
电动车窗防夹主要是指在玻璃上升过程中,夹到障碍物达到一定程度后,车窗会自行停止。防夹区域、防夹阈值力、防夹执行动作,是实现防夹功能的3个重要指标。根据FMVSS118标准可知:(1)防夹区域定义为从离门窗顶端4~200mm的区域。(2)防夹阈值力为100N。(3)当遇到障碍物时,车窗电机反向,车窗玻璃下降一段距离后停止,等待用户的进一步指令。防夹功能只在指定的防夹区域开启,准确检测车窗玻璃的实时位置是首要任务。
1.1 车窗玻璃位置检测
车窗升降方式一般分为钢丝式和机械手臂式,论文着重针对于手臂式进行研究。车窗的上升、下降主要通过车窗电机及机械手臂实现,机械手臂采用交叉式,随着电机的转动,两个交叉手臂的交叉角度会发生变化,进而使车窗的驱动力臂变化,最终车窗玻璃将随着电机的正反转实现升降。在车窗玻璃升降过程中,升降距离跟电机的转数成比例,电机的转子旋转,会使霍尔传感器产生脉冲信号,MM912F634将霍尔脉冲信号进行计数,通过多次实际测量获取参考基准值,根据参考值可计算出当前车窗玻璃的位置,同时将参考基准值通过LIN总线传到主控单元中进行保存,车窗控制器可根据车窗玻璃当前所处的区域判断是否启动防夹功能。由于车窗结构存在磨损,主控单元可自行对每一个车窗进行校正。
1.2 电流检测
车窗电机电流检测是检测防夹阈值力的一个主要手段,电机电枢电流会根据负载变化而产生改变,电流检测部分的关键是电流阈值的判断,电流阈值的准确性决定防夹系统的稳定性,电流的检测往往容易受到电机启动、车窗机械结构等因素的干扰,检测电流时需要对信号进行放大、滤波等处理,保证电流检测的准确性。信号采集过程需要通过多次测试,以选取合适的滤波方法。
1.3 系统方案的确定
车窗防夹系统主要包括4个子单元和一个主控单元,主控单元由控制器(MC9S12DG128)和液晶控制屏(Z2104)组成。每个子单元包含控制器(MM912F634)、位置检测模块、电流检测模块和电机驱动模块,通过LIN总线连接到主控单元上,形成车载LIN网络,驾驶员可以通过液晶控制屏对每个车窗进行控制。每个车窗的构成基本相同,车窗位置、阈值力均参考FMVSS118标准。具体结构如图1所示。

2 防夹系统硬件设计
2.1 控制器
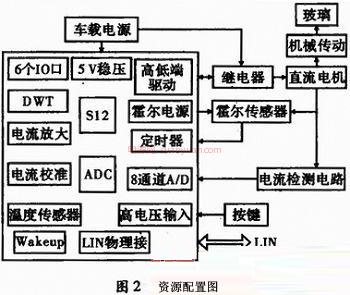
设计选取两种微处理器分别作为主控制器和子控制器,型号分别为MC9S12DG128、MM912F634,这两款均为Freesclae公司高性能汽车电子芯片,特别是MM912F634,内置集成稳压器、电流放大器、LIN物理接口、大电流高低端驱动、温度传感器、模数转换等功能模块,外围元件较少,有利于降低成本,节省硬件体积,适用于车载电子设备,资源配置如图2所示。液晶模块是驾驶员与系统相互连接的媒介,型号为Z2104,该屏幕为电阻屏,内置VGA控制板,与控制器通过串口进行通信,工作电压为12 V。主控制器可以直接通过串口读取液晶屏触摸信号对液晶屏幕的画面进行控制,将液晶屏幕的触摸信号转换成LIN总线指令,对子单元进行控制,同时,也能将车窗的状态反馈给驾驶员。
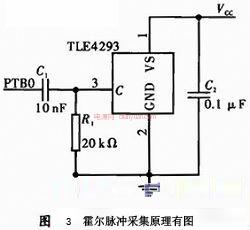
霍尔传感器是电动车窗系统的主要信号采集元件。英飞凌公司的TLE4923霍尔传感器,输出的脉冲信号无需额外复杂的整形电路,输出端(OUT)经过无源低通滤波器,直接连到MM912F634的PTB0,PTB0为定时器的一个捕捉通道,可直接对霍尔传感器的脉冲信号进行计数,霍尔脉冲采集原理如图3所示。
2.3 电流检测及电机驱动硬件设计
电机是实现电动车窗升降的执行器,每个车窗均配有一个直流电机,通过机械传动实现车窗自行升降,电机驱动可采用两种方式:一种采用MOSFET搭制的H桥电路,成本较高但性能稳定;另一种采用继电器控制,成本较低且控制简单。设计出于成本的考虑,选用继电器控制方式,型号为松下公司的ACT212,MM912F634集成了高低端驱动器,可直接对ACT212进行控制,无需外搭继电器驱动电路,具体原理结构图如图4上部分所示。
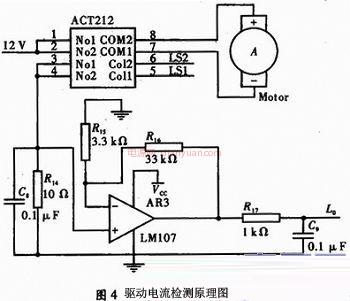
相关实验表明,车窗玻璃在上升过程中,遇到障碍物的瞬间,电机轴的负载转矩会突然增大。因此,电机轴负载转矩变化率对障碍物较灵敏。然而,在实际应用中,电机轴负载转矩却不易测量。根据直流电机的特性,负载转矩变化会引起电枢电流的变化,电枢电流的变化能够间接地反应车窗的运行状态,检测电枢电流进而确定电动车窗的阈值力。论文采用直接测量方式,将一段康铜丝串入电机回路,康铜丝具有较低的电阻温度系数,较宽的使用温度范围,加工方便,具有良好的焊接性能,可根据实际调试情况进行调整阻值大小,一般范围为0~15 mΩ。电流检测基本原理如图4所示。
根据电路理论可得

电机电枢电流经过康铜丝转换成电压信号,经过滤波、放大直接接入。MM912F634的A/D通道,MM912F634的A/D转换精度为10位,由式(1)可得A/D转换结果uAD(t)

由式(2)可知,直流电机的电枢电流与A/D转换结果uAD(t)之间是线性关系,因此,电机轴负载转矩与A/D转换结果之间也是线性关系,选择A/D转换结果的变化率作为障碍物检测的判断指标是合理的。MM912F634对A/D转换数据进行处理,确定当前的车窗运行状态,进行车窗的智能防夹,同时与主控单元进行总线通信,随时发送子系统状态。
3 防夹系统的软件设计
电动车窗防夹系统主要包括主控和子单元两部分,为增强主控的拓展性,主控系统软件设计基于嵌入式实时操作系统,将μC-OSⅡ实时操作系统移植到MC9S12DG128中,每个车窗防夹为系统的一个任务,同时车身的其他控制也可以以任务的形式添加到主控系统之中。每个子系统采用中断的方式进行检测、控制,提高了系统的实时响应性。
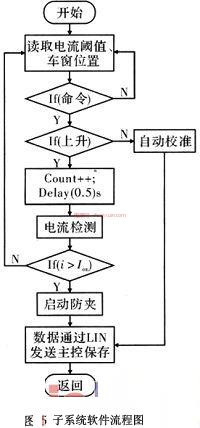
由于MM91217634没有集成E2PROM,车窗的阈值电流Ion、车窗位置计数值count,均需要通过LIN总线发送到主控单元中进行保存,在上电启动时,需要通过LIN总线去读取车窗位置、主控的触摸输入,控制ACT212实现车窗的升降,在运行过程中实时对电枢电流进行采集,与阈值电流进行比较,同时要确定车窗的位置是否在防夹区域内,由于电机启动时,电枢的瞬时电流可能会高于阈值电流,在启动检测电流时,需要一定的时间延时。若车窗的电流>Ion,车窗又在防夹区域内,则控制继电器实施防夹。在车窗升降的过程中,MM912F634需要对霍尔脉冲信号进行计数,实时测量车窗位置,在防夹过程结束后,子控制器需要将当前的车窗状态参数通过LIN总线反馈给主控器并进行显示,子系统的软件流程图如图5所示。
4 实验测试
完成整个系统设计后,首先进行系统校正,测试出系统的各项参数,然后进行整体的防夹功能检测。图6所示为车窗在上升过程中,由电枢电流转变的电压变化曲线,在启动时,电枢电流会有个瞬时增高,经过一段时间平稳后,车窗遇到了障碍物,电枢电流已超过阈值电流,并持续了一段时间,当车窗进入到防夹区域时,系统启动防夹功能将车窗关闭,此时电流为零。经过反复测试,该系统能够准确地实现防夹功能。

5 结束语
阐述了电动车窗防夹系统的设计,通过霍尔传感器、电流检测,实现了电动车窗智能防夹功能,并将其接入LIN网络,通过主控液晶进行监测控制,提高了系统的集成度、降低了成本、方便驾驶员控制。通过安全实验证明,该系统运行稳定,并且能准确地实现防夹功能。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 研发工程师的工具箱 |
 |
| 智慧生活 创新未来 |


| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006