| |||||||
太阳能以其不竭性和环保优势已成为当今国内外最具有发展前景的新能源之一。光伏(PV)发电技术在国外已得到深入研究和推广,我国在技术上也已基本成熟,并进入推广应用阶段。高效采集太阳能作为太阳能光伏发电的关键技术之一,目前较多利用的是太阳能光感跟踪方法。按照跟踪自由度的多少,太阳能跟踪伺服系统可分为两类:单轴和双轴。因双轴跟踪精度优于单轴,现已被普遍采用。
文中以基于步进电机的双轴跟踪伺服系统为研究对象,在文献中提出的传统PID控制器基础上,结合模糊控制理论,设计出自适应模糊PID控制器,并在Simulink环境中建立方位角跟踪传动机构仿真模型且完成仿真。
1 自适应模糊PID控制策略分析
在工业生产过程中,由于操作者经验不易精确描述,控制过程中各种信号量及评价指标不易定量表示,传统PID方法受到局限。运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊规则及有关信息作为知识存入计算机知识库,然后计算机根据控制系统的实际响应情况,运用模糊推理即可自动实现对PID参数的最佳调整,以此实现自适应模糊PID控制。
PID控制器由比例系数(KP)、积分系数(KI)和微分系数(KD)组成,其实质就是根据输入的偏差值按比例、积分、微分函数关系进行运算,运算结果用于控制输出,包括测量、比较和执行3个部分。PID是一种有效而简单的控制器,能够在保证基本不影响系统稳定精度的前提下提高系统的相对稳定性,很好地改善系统的动态性能。基本控制规律可描述为:

模糊控制实质上是一种非线性控制,属于智能控制的范畴。它是在控制方法上应用模糊集理论、模糊语言变量及模糊逻辑推理的知识来模拟人的模糊思维方法,用计算机实现与操作者相同的控制。模糊控制器的基本结构包括知识库、模糊推理、输入量模糊化、输出量精确化四部分。模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制。
结合PID与模糊控制两种算法的特征与优势,自适应模糊PID典型控制系统主要包括参数可调PID和模糊控制系统两部分组成,其系统结构如图1所示。

PID控制部分实现对系统的控制,自适应模糊控制部分以误差和误差变化率作为输入。它根据不同时刻的输入,利用模糊控制规则在线对PID参数KP、KI和KD进行修改,以满足控制器参数的不同要求,使被控对象具有良好的动态与静态性能,从而提高对被控对象的控制效果。
2 被控对象模型
目前,关于太阳能伺服系统模型大多是对直流电机建模,并没有考虑到系统参数对跟踪系统的影响。文中采用的被控对象为文献中提出的基于步进电机的双轴跟踪伺服系统,其基本功能是使光伏阵列快速、平稳且准确地跟踪定位太阳光源。利用天文知识可以精确地获得太阳高度角和方位角。太阳光源跟踪伺服系统时刻检测光伏阵列和太阳光源的位置并将其输入到驱动运算单元,并产生输出信号驱动两部电机,分别在水平面和铅锤面内运动,使太阳光时刻垂直入射到光伏阵列的表面上,达到准确和快速跟踪太阳光源的目的。太阳能光源跟踪伺服系统如图2所示。

由于高度角跟踪传动机构与方位角传动机构工作时互不影响,下面以方位角跟踪传动机构为例进行建模和仿真研究。由文献可知,方位角跟踪传动机构的传递函数为:

3 自适应模糊PID控制器的设计
该控制系统设计的关键是要先找出3个参数与误差e和误差变化率ec之间的模糊关系,要求在系统运行中不断检测e和ec,根据模糊控制原理对3个参数进行在线修正以满足不同情况下对参数的不同要求,最终获得良好的动态和静态控制性能。
3.1 确定模糊控制器的结构
基于对系统的上述分析,模糊控制器采用两输入、三输出的控制器,将误差e和误差的变化率ec作为输入,将PID控制器的3个参数的修正值作为输出。KP,KI,KD参数调整算式如下:

3.2 确定语言变量并确定语言值的隶属度函数
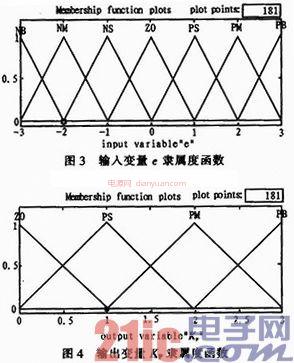
设定输入误差e的语言变量为E,误差变化率ec的语言变量为EC,两者的论域都为{-3,-2,-1,0,1,2,3},相应的语言值为{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)};输出△KP的语言变量为△KP、△KI的语言变量为△KI、△KD的语言变量为△KD,三者的论域都为{0,1,2,3},相应的语言值为{零(ZO),正小(PS),正中(PM),正大(PB)}。输入输出变量的隶属度函数采用三角函数。输入变量e的隶属函数如图3所示,输出变量△KP的隶属函数如图4所示。
3.3 建立模糊控制规则
PID参数的适应必须考虑到在不同时刻3个参数的作用以及相互之间的互联关系。对于不同的误差e和误差的变化率ec,控制器参数的自整定原则可归纳如下:1)当误差较大时,为使系统具有较好的快速跟踪性能,应取较大的KP和较小的KD参数,同时为避免系统响应出现较大的超调,应对积分作用加以限制,取较小的KI;2)当误差处于中等大小时,为使系统响应具有较小的超调,KP应取小一些,同时为保证系统的响应速度,KI和KD大小要适中;3)当误差较小时,为保证系统具有较好的稳态特性,KP和KI应取得大一些,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,当误差变化率较小时,KD可取大些,当误差变化率较大时,KD应取小一些。
按以上原理并根据PID参数自适应原则和操作经验列出输出变量的模糊控制规则如表1所示。

3.4 模糊量的清晰化
模糊量的清晰化就是把模糊推理后得到的模糊集转化为控制的数字值,这里采用重心法对模糊量进行清晰化。重心法是取隶属度函数曲线与横坐标围成面积的重心作为模糊推理的最终输出值,即:

4 仿真结果分析
文中在Simulink环境中搭建PID控制仿真模型和自适应模糊PID控制仿真模型。其中,KP,KI,KD保持文献中所提供的参数:KP=1.81,KI=0.4,KD=0.158。对仿真模型施加单位阶跃输入信号,仿真时间为5 s。其响应曲线如图5所示,误差变化曲线如图6所示,控制效果如表2所示。
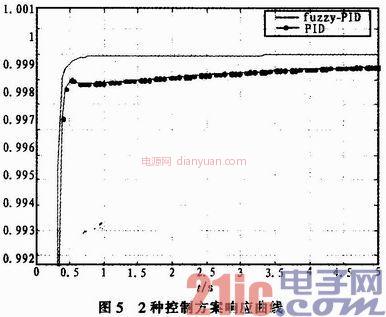
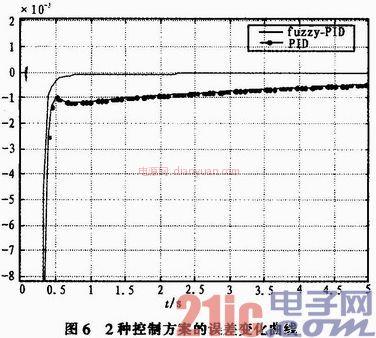

从图5、图6及表2两种控制方法的仿真结果对比来看,自适应模糊PID控制响应速度较传统的PID快。在稳态误差方面,自适应模糊PID控制较传统的PID小。综上所述,太阳能伺服系统中自适应模糊PID控制器具有响应时间短、稳态误差小等特点,系统具有更好的适应性和鲁棒性。
5 结束语
文中采用自适应模糊PID控制器对文献中提出的双轴跟踪伺服系统模型进行控制,通过在Simulink环境中的仿真结果发现,自适应模糊PID控制器较文献中传统的PID控制器具有较强的稳定性、适应性与鲁棒性,这在双轴跟踪伺服系统的控制过程中具有重要实用价值与应用空间。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。



| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006