目前在电子系统中有诸如温度、压力、位置、重量和流量等物理参数的精确测量,这些信号中的一些传感器和前置放大器需要正负电压源驱动或供电,以提供足够宽的动态范围和抗干扰性;一些手持设备的LCD显示屏也需要一个负的偏压。这些电子系统通常使用12V或24V的直流电源供电,所以必须使用一个直流变换器从正的电源得到一个负的电压,满足系统的要求。在本文中将讨论各种负压变换器各种拓朴结构及工作原理,并比较它们各自的优缺点,从而为电子工程师提供一些设计的指导。
1 Buck-Boost变换器
基本的Buck-Boost变换器的结构见图1所示。主开关管在输入侧的高边,与Buck变换器相同;二极管在输入侧的高边,与Boost变换器相同,因此这种结构称为Buck-Boost变换器。但注意到:二极管的方向与Boost变换器的二极管的方向相反,因此输出得到是负电压。在开关周期开始时,主开关管导通,电感激磁,电感的电流线性上升。二极管由于承受负电压,处于关断状态,此时,输出的负载电流由输出的大电容维持。主开关管关断后,二极管导通,电感去磁,电感的电流线性降低,到下一个周期主开关管又导通;同时,存储在电感的中的能量向输出负载传输能量。
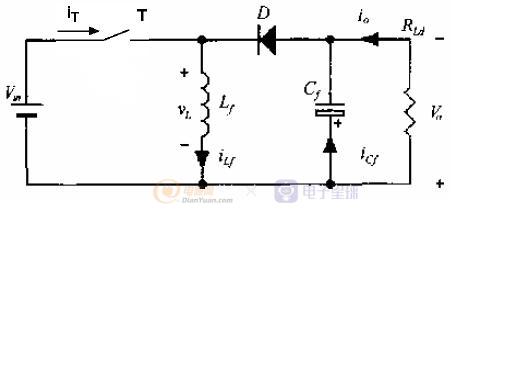
图1:基本的Buck-Boost变换器
输出电压为:
其中,
从公式可以得到:输出电压的绝对值可以大于或少于输入电压。由于在主开关管导通期间,输入电压不向输出负载传输能量,输出的负载电流完全由输出的大电容维持,因此输出的纹波电压大,噪声大。由于后级的信号处理模拟电路对电源的纹波电压要求高,因此使用这种结构时,通常在变换器的后面再加一个由于高性能的线性稳压器,以抑止其输入侧带入的噪声和纹波。
2 CUK变换器
CUK电路采用双电感结构,可以克服Buck-Boost变换器输出纹波大的缺点,实现低的输出纹波。CUK变换器的结构见图2所示。
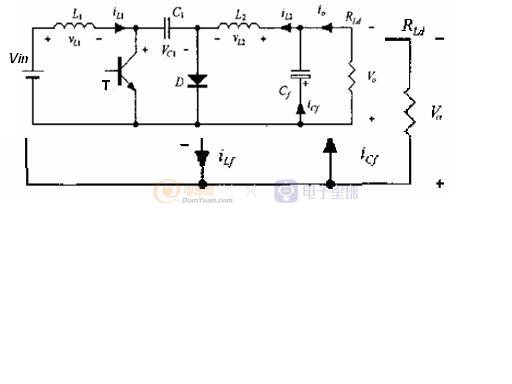
图2:CUK变换器
在开关周期开始时,主开关管导通,电感L1和L2同时激磁,电感的电流线性上升。二极管由于承受负电压,处于关断状态。主开关管关断后,二极管导通,电感L1和L2同时去磁,电感的电流线性降低,到下一个周期主开关管又导通;注意到在开关管开通过程中,电感L2存储能量,在开关管关断的过程中,存储在电感L2中的能量输出给负载,因此输出电压纹波小。输出电压为:
从公式可以得到:输出电压的绝对值可以大于或少于输入电压。CUK变换器需要双电感,结构变得复杂,成本也增加,同时效率降低。此外,开关管流过两个电感的激磁电流,电流的应力大。若使用使用耦合电感,在同样的磁化电感的条件下,电流纹波减小一半。CUK电路适合于对输出电压纹波有较高要求的应用。
注意到,耦合电容在主功率回路中,流过高频的大电流,所以要选用低ESR/ESL的X5R/X7R陶瓷电容。在主开关管导通时,耦合电容的电流与输出的负载电流相同,因此可以通过下式来计算:
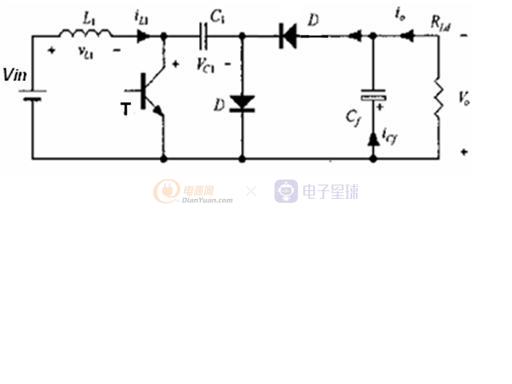
图3:基于CUK的充电泵变换器
由于使用单电感结构,成本低,但输出的电压纹波变大。这种结构的优势在于由于输入结构和Boost相同,功率管的S极接地,因此可以直接使用N沟道的MOSFET,驱动简单;同时电流取样可以放在低边,也简化的设计,而Buck-Boost Buck变换器没有这种特点。
注意到,若对负输出作调节,参考电压的选取有二种方式:一是控制器可以提供一个负的参考电压。若控制器不能提供负的参考电压,就必须外加一个运放作反馈电压的转化,如图4(a)所示,外部的运算放大器接为反相放大器,其中,
(a) 利用外部放大器
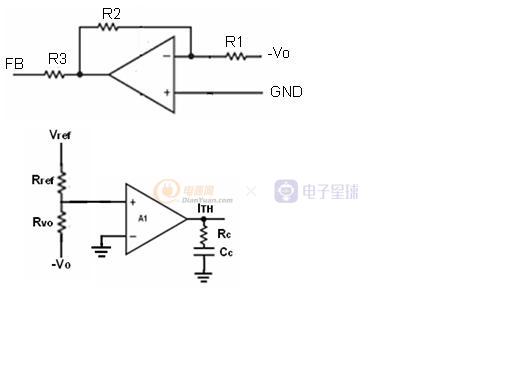
(b) 利用内部放大器
图4:负输出电压的反馈设计
有些控制器将电压反馈的误差放大器的同相端和反相端都引出,如图4(b)所示,同时提供一个正的参考电压。此时,若要输出负电压,可以将放大器的反相端接地,同相端在外部通过一个电阻接到正的参考电压,并且通过另一个电阻接到负输出端,即可以得到负的输出电压。由放大器的工作原理,运放的同相端的电压必须为0,同时流入同相端的电流为0,所以:
同相端的电压为:
当输出电流增加,输出的电压绝对值
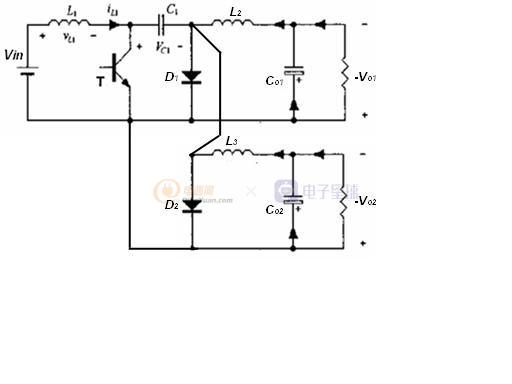
图5:多路负输出
有些应用需要双路多路的负输出电压如-5V、-12V、-15V及-24V等,为了降低成本,可以对输出电流最大的一路使用CUK变换器,而对其它的输出采用在输出电感加耦合绕组的方法获取,如图5所示。这种方式成本低,但效率也较低。
由于只能对其中的一路作输出调节,因此对于其它的输出,如果输出精确要求不是很高,可以在输出加稳压管得到需要的电压。如果输出精确要求较高,可以在输出加线性稳压器。
注意到CUK电路的左边和Boost变换器相同,因此在有升压Boost变换器的系统中,可以基于Boost变换器,额外的加一个电感、二极管和耦合电容,配置成CUK电路,得到一路负压。通常Boost变换器处于反馈调节,那么,没有反馈调节的CUK就可以通过改变电感的匝数并在后面加稳压管和线性稳压器得到需要的电压。
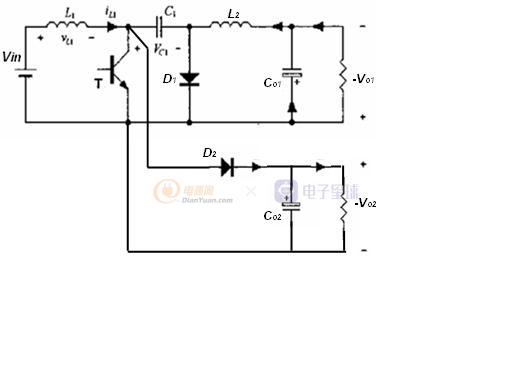
图6:Boost正输出和CUK负输出
3 以负电压为地的Buck变换器
基于通用的Buck变换器也可以得到负电压。可以设想:通用的Buck变换器的输入输出是以地为基准,所以输入输出都为正。如果将控制器的地以负电压的基准,而输出的正端为地,那么,输入电压和输出的地对于负电压的基准,就都为正。
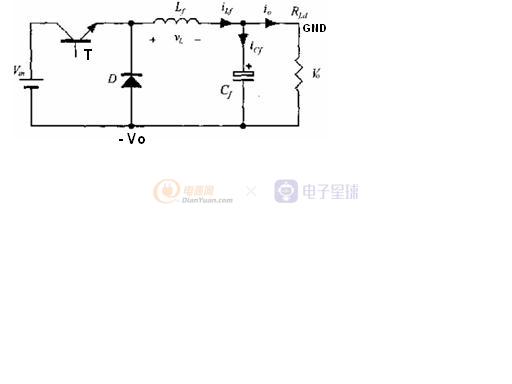
图7:基于Buck变换器负变换器
与通用的Buck变换器不同的是,通用的Buck的输出电流是直流值,而这种结构的输出电流是方波,其峰峰值大于输出的电流值。而且输出电压的纹波和输出电容的纹波电流也远大于通用的Buck变换器。必要的话,可以在其输出加一级的LC滤波器。这种变换器有两种工作模式:不连续的DCM和连续CCM。不连续的DCM的反馈容易设计,可用较小的电感值,但开关管中的峰值电流大,因此对于同样额定电流的开关管,所得到的输出电流小。如果输出的负载电流大,要选用CCM模式,用大的电感值。
通用的Buck变换器续流二极管流过负载电流,在起动和输出过载时,也不会产生大电流。而这种负变换器在起动和过载时,二极管的平均远大于正常工作的电流,特别是在CCM工作模式下,必须用较大的电流额定值。
基于通用的Buck变换器也可以配置为负输出的SEPIC电路,如图8所示。
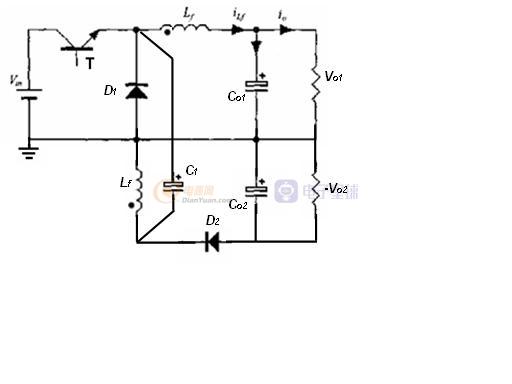
图8:基于Buck的负输出SEPIC电路
图中上部为通用的Buck变换器,得到可以调节的精确的正输出电压。下部通过耦合电感及耦合电容得到负的输出,注意图中所示的耦合电感的极性。事实上,耦合电感就是变压器,类似于反激电路的方式得到负的输出电压。加入耦合电容C1,就变为SEPIC电路,从而提高输出的调节性,降低电感纹波。同样,负输出由于没有反馈调节,通过改变耦合电感的匝数和加稳压管或线性稳压器的方法得到稳定的负输出。
4 Flyback反激变换器
通用的反激变换器由于使用变压器,通过光耦调节可以得到完全隔离的输出,而且由于输出绕组浮空,因此可以任意的接为正输出或负输出电压。反激变换器增加一个绕组和一个二极管就可以增加一路的输出,因此非常容易得到多路的输出,而且成本低。其工作原理和结构在本文中就不作详细的介绍。
