现在并网逆变器很火,我前一段时间专门学习了一下相关的知识。开贴与大家分享一下,也请大家提出问题,大家一起讨论,共同进步。采用分段写的形式,有时间不断更新。
现在并网逆变器很火,我前一段时间专门学习了一下相关的知识。开贴与大家分享一下,也请大家提出问题,大家一起讨论,共同进步。采用分段写的形式,有时间不断更新。
坐等楼主更新,传说中的SPWM或SVPWM,加空间解耦,前馈补偿
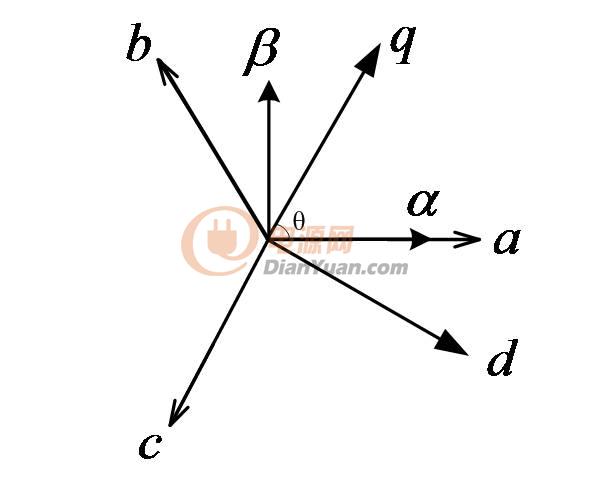
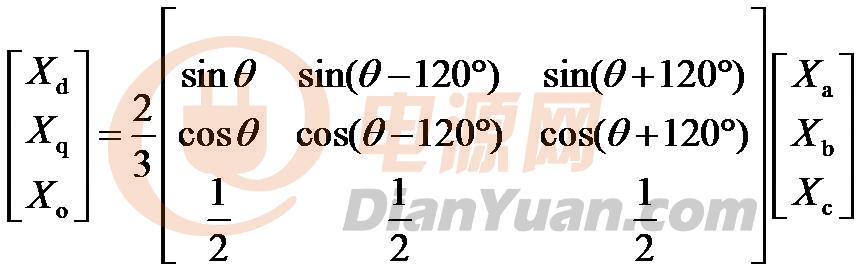
在三相系统中,常见的有三种坐标系:三相静止坐标系(abc)、二相静止坐标系(alpha-beta)、二相旋转坐标系。
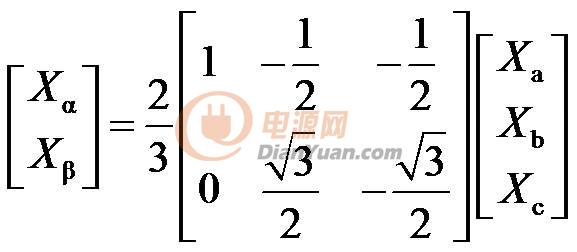
平常见的ABC分布在平面上,互差120°就是三相静止坐标系。因为这个是二维平面,用二个不用向的矢量就可以表述整个平面上的向量,因此用平面上二个垂直的坐标系就可以表示三相坐标系中的量,即为二相静止坐标系。在三相或二相静止坐标系中,各个量(电压电流。。。)都是余弦函数,是个变化的数值。这二种坐标系的的特点是坐标轴都是固定的,数值是变化的。计算起来也麻烦。
如果我们将坐标轴按照电压或电流的频率来旋转,在轴上通一幅值为电压或电流最大值的直流量时,就发现这个直流量在静止坐标系上的投影就是电压或电流在静止坐标系下的值。就是说这二种方法要表达的结果是一样的,只不过是表达的方式不一样罢了。这种坐标系(二相旋转坐标系)的特点是坐标轴旋转,数值是直流量。
实际上在控制的时候正常都用二相旋转坐标系来控制。理由如下:
1、静止坐标系下得量是一个变化的数值,用PI调节(现在用的最多的方法)时要跟踪的是一个变化量,这样必然会有误差!(静态误差或叫静差,这从理论上就无法消除)
2、二相旋转坐标系的坐标轴是二个垂直的量,选择好参考角度,就可以用一个轴表示有功一个轴表示无功,这样很容易控制变流器的功率因数,而这个参数在并网时是有严格要求的。
mark
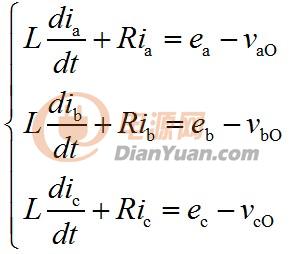
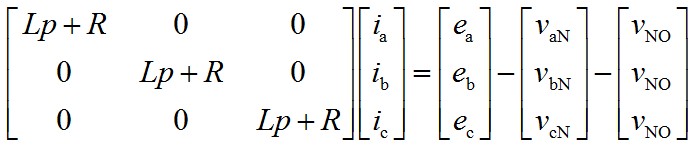
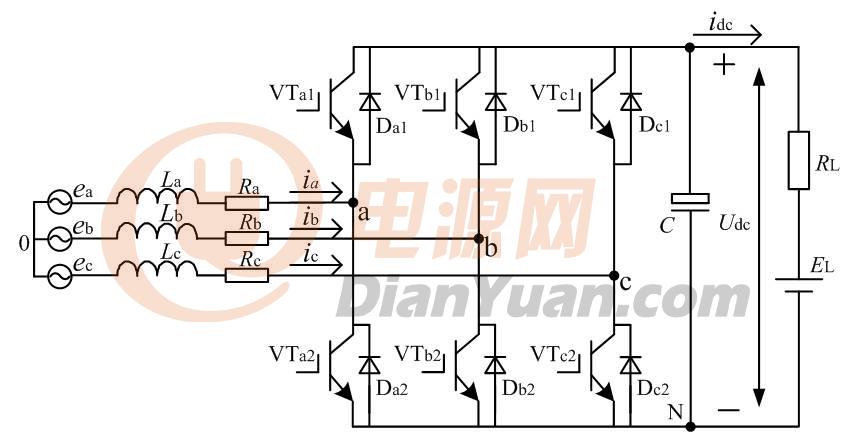
下面再回头看看三相半桥。不考虑死区时各个桥臂的开关状态总是互补的。不会同时通也不会同时断(断了相当于这一桥臂没起作用,死区时间很短,暂不考虑)。
我们把上桥臂导通下桥臂关断定义为1,下桥臂导通上桥臂关断定义为0.则三相桥臂一共有2的三次方=8种状态。
在ABC=100时(表示A的开关状态为上通下断,BC的状态都为下通上断。下面的用法类同)。
A端电压为UDC,BC端电压都为0,此时的电路化简为下图的样子
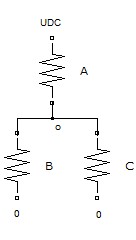
由于是三相对称的,三个负载一样。则很容易得到UAO=2UDC/3,UBO=UCO=-UDC/3,
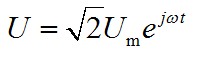
将这种状态下的电压带入矢量定义公式 中得到:
中得到:
U=2UDC/3,
同理可以得到其他状态的值,列入下表中
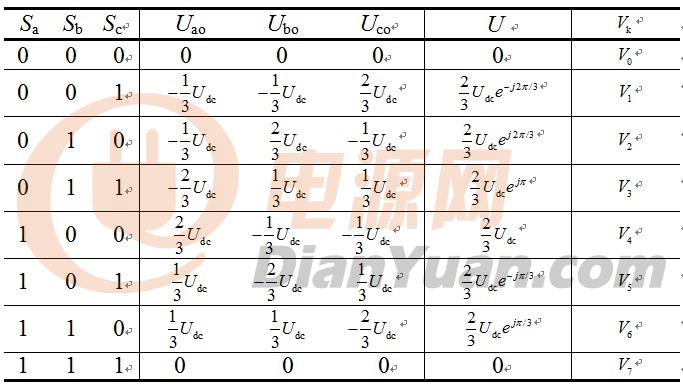
将各种状态下的值画在图中如下:
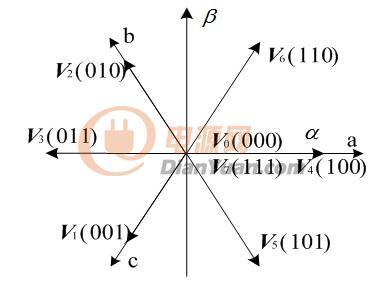
共8个矢量,6个非零矢量和2个零矢量。6个非零矢量将平面均分成6个区域。
有这几个矢量的组合可以合成该平面上的想要的任何矢量。


 源源帮顶
源源帮顶